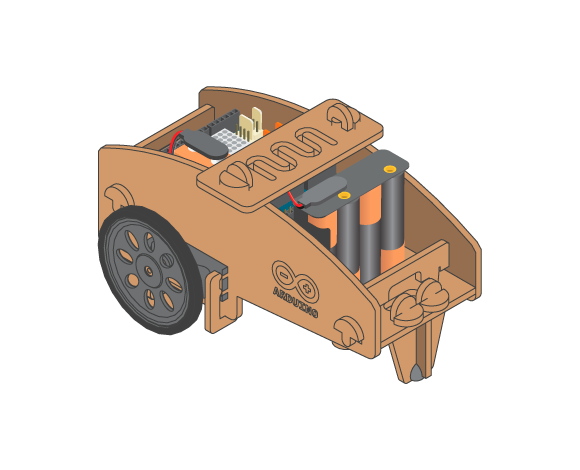
El Segueix Línies fa exactament allò que suggereix el seu nom: segueix una línia. Fes-lo anar per on vulguis mostrant-li el camí amb una línia negra de 3cm d’amplada.
Materials
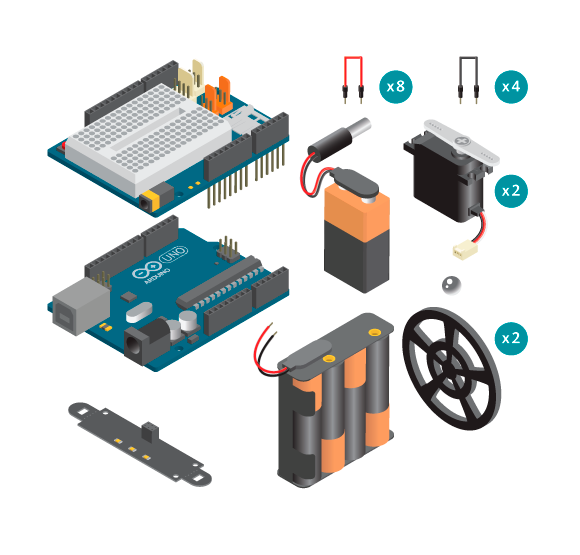
- 1 placa Arduino U
- 1 Shield Bàsica Educativa
- 1 IR Array
- 2 servos de rotació contínua
- 4 cables negres
- 8 cables de colors
- 2 connectors de piles (un amb jack connector i l’altre amb dos cables solts)
- 1 portapiles 4 AA
- 1 pila de 9V
- 4 piles AA
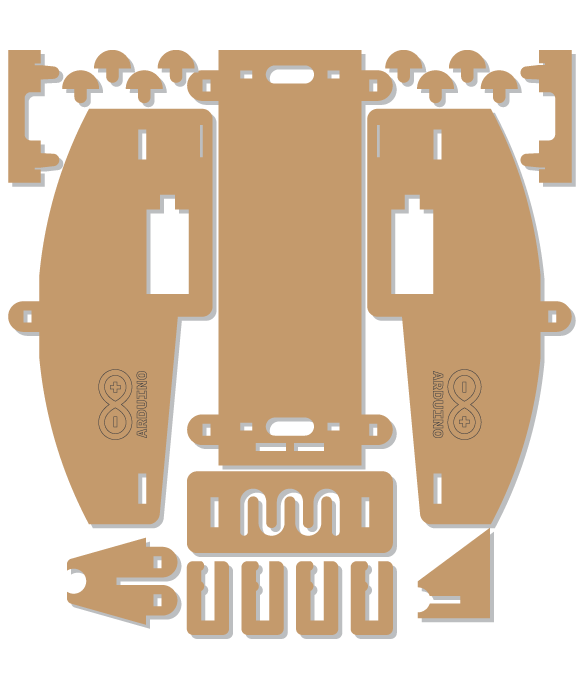
- 1 kit Segueix Línies
- 1 bola metàl·lica
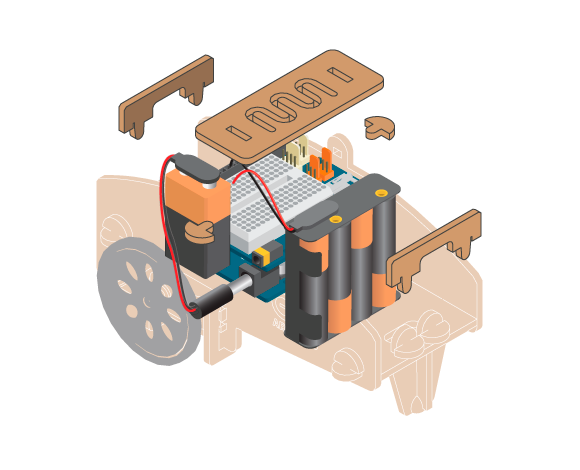
Instruccions
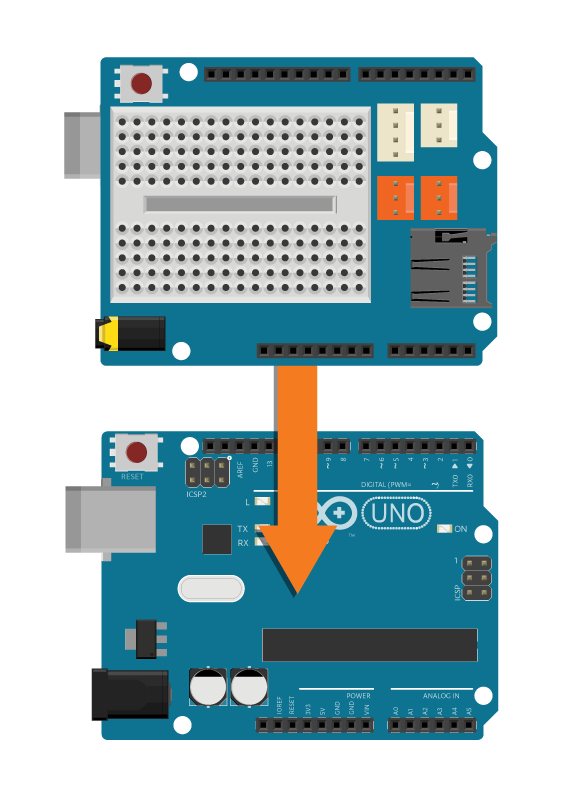
- Connecta la Shield a la part superior del teu Arduino.
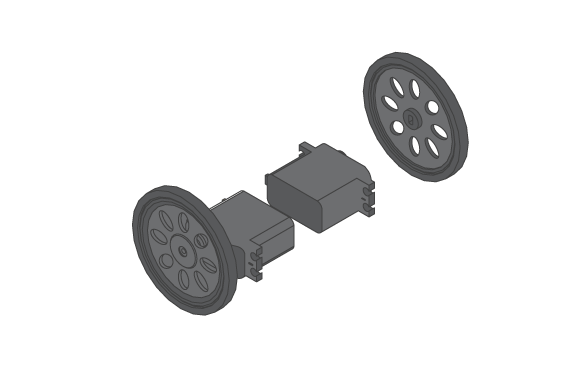
- Munta un servo a cada costat del Segueix Línies.
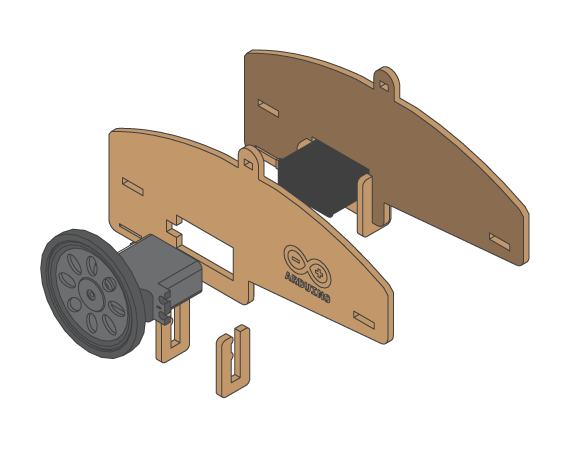
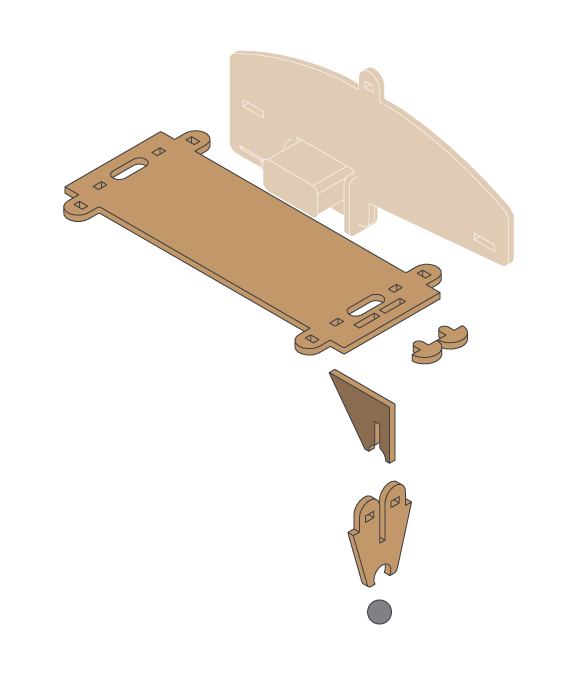
- Munta les peces de la bola a la part del mig del Segueix Línies.
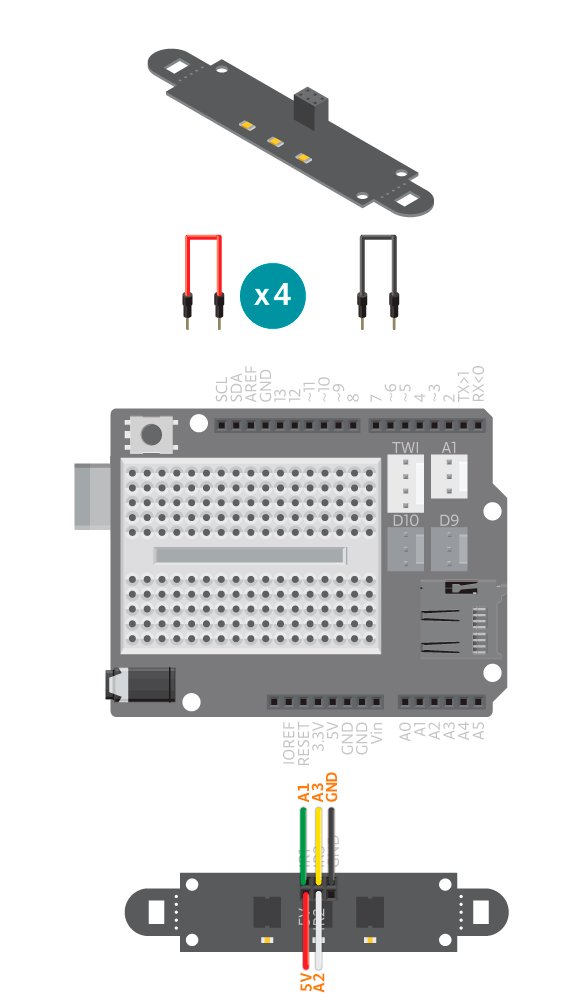
- Connecta cinc cables a 5V, GND, IR1, IR2, i IR3 de l’IRArray.
- Passa els cables pel forat que hi ha davant de la meitat de la base i acaba de muntar el cos principal.

- Connecta els cables solts de l’IRArray. 5V a 5V, GND a GND, IR1 a A1, IR2 a A2 i IR3 a A3.

- Utilitzant tres cables, connecta el servo esquerre: el cable negre a GND, el cable blanc al Pin digital 10 i el cable vermell a la breadboard.

- Utilitzant tres cables, connecta el servo dret: el cable negre a GND, el cable blanc al Pin digital 9 i el cable vermell a la breadboard.

- Connecta l’Arduino a l’ordinador i puja l’exemple LineFollower.

- Connecta el portapiles 4 AA. El cable negre a GND i el vermell als dos cables vermells dels servos a la breadboard.
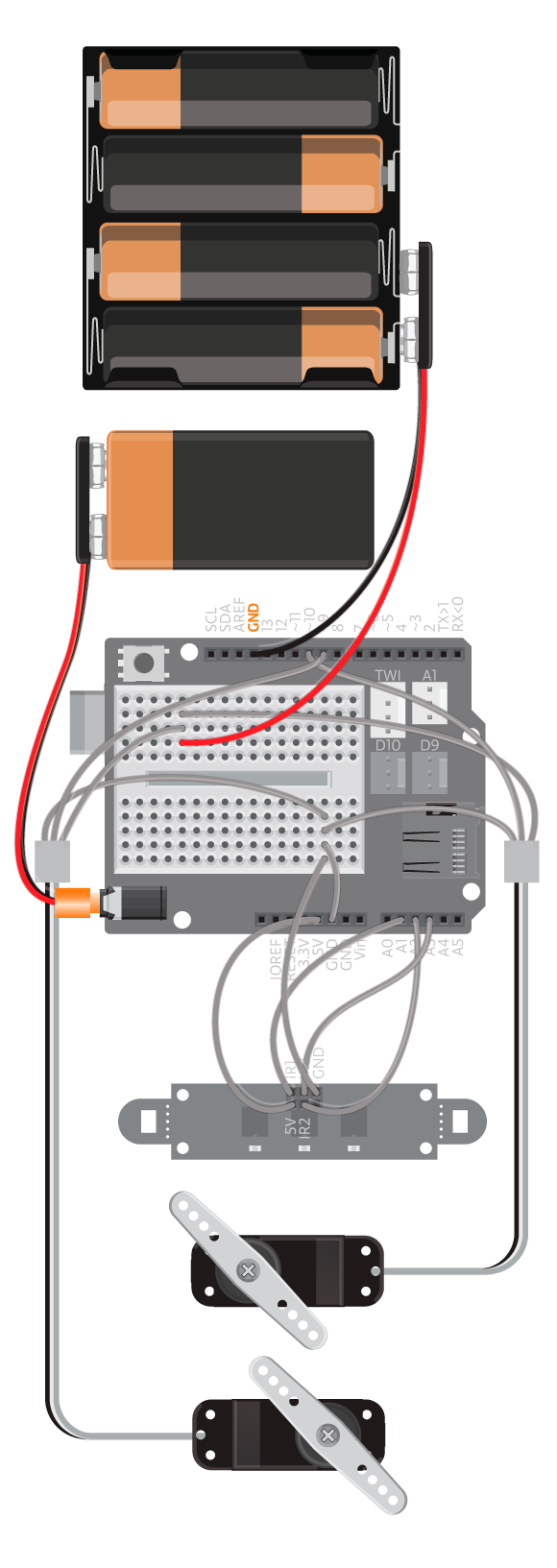
- Col·loca l’Arduino i la Shield a la part superior del Segueix Línies i connecta la pila de 9V a Arduino.
Codi
Pots trobar el codi a Arxius -> Exemples -> BasicEducationSheild-> Robots-> LineFollower
Com funciona?
Els sensors IR a l’IRArray poden detectar blanc i negre. Usant l’ordre readLine()obtenim un valor entre -100 i 100 que representa la direcció en què la línia es dirigeix. Aquest valor després és usat per dir a les rodes en quina direcció anar escrivint wheels.follow(dirección).
No funciona?
- Revisa les il·lustracions i comprova les teves connexions. Comprova que tots els cables estan fermament connectats.
- Els motors no funcionen? Mira la referència per corregir els servos usats com a rodes.
- Corregeix l’IRArray, mira la referència per corregir l’IRArray.
Continua experimentant!
- Imprimeix una pista i construeix obstacles pel robot. Si els obstacles són massa difícils, pensa si hi ha cap manera de millorar el funcionament del robot modificant-ne les rodes.
- Fes que el robot reaccioni de manera especial quan veu només blanc. És a dir, quan hagi perdut la línia negra.