El Sigue Líneas hace exactamente lo que su nombre sugiere: sigue una línea. Hazle ir por donde quieras que vaya enseñándole el camino con una línea negra de 3 cm de ancha.
Materiales
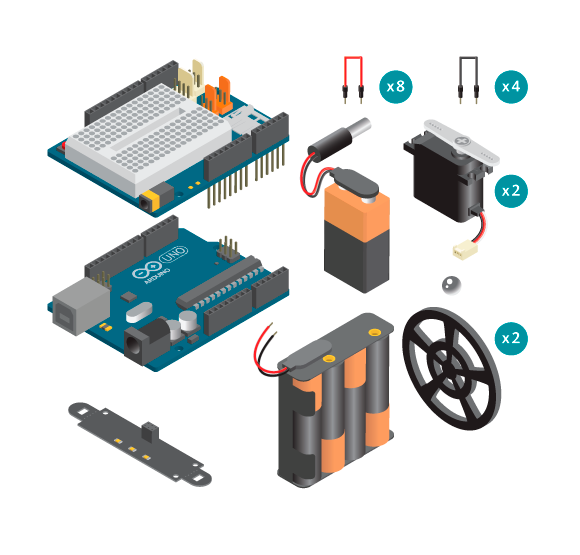
- 1 placa Arduino Uno
- 1 shield Educativa
- 1 IR Array
- 2 servos de rotación continua
- 4 cables negros
- 8 cables de colores
- 2 conectores de pilas (uno con jack conector y otro con dos cables sueltos)
- 1 portapilas 4 AA
- 1 pila de 9V
- 4 pilas AA
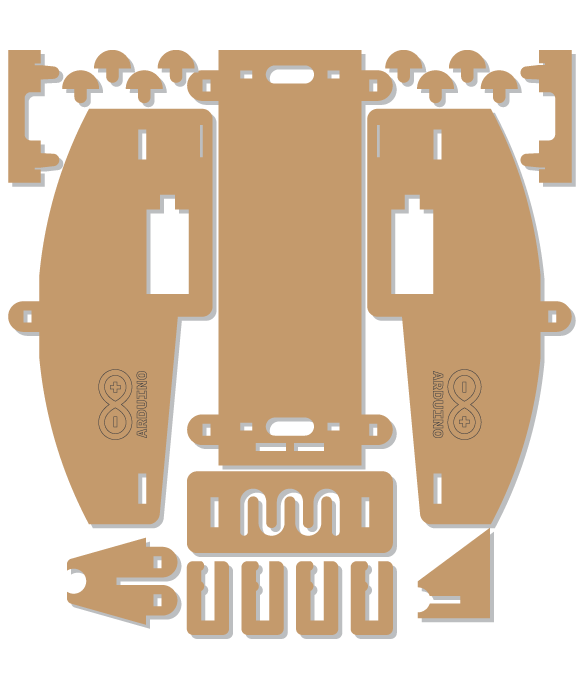
- 1 kit Sigue líneas
- 1 bola metálica
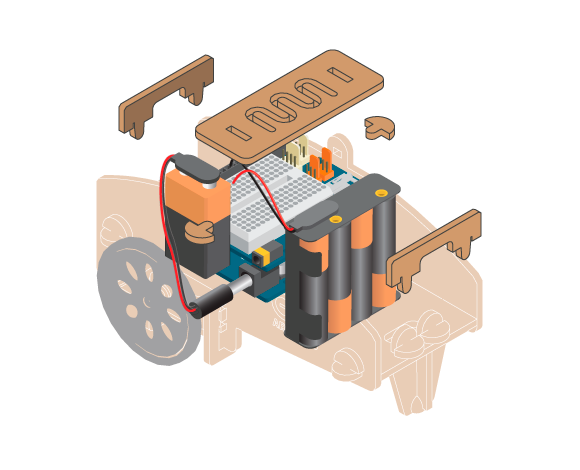
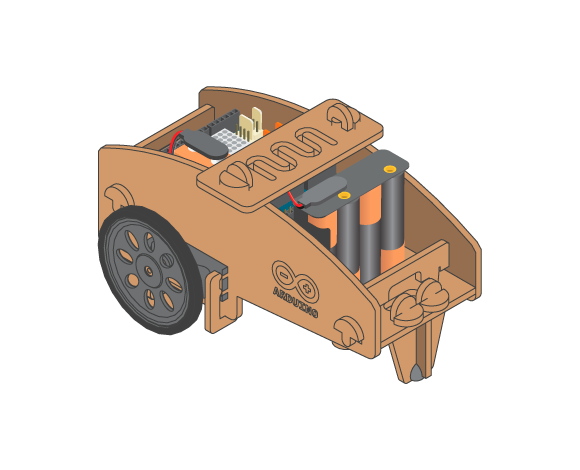
Instrucciones
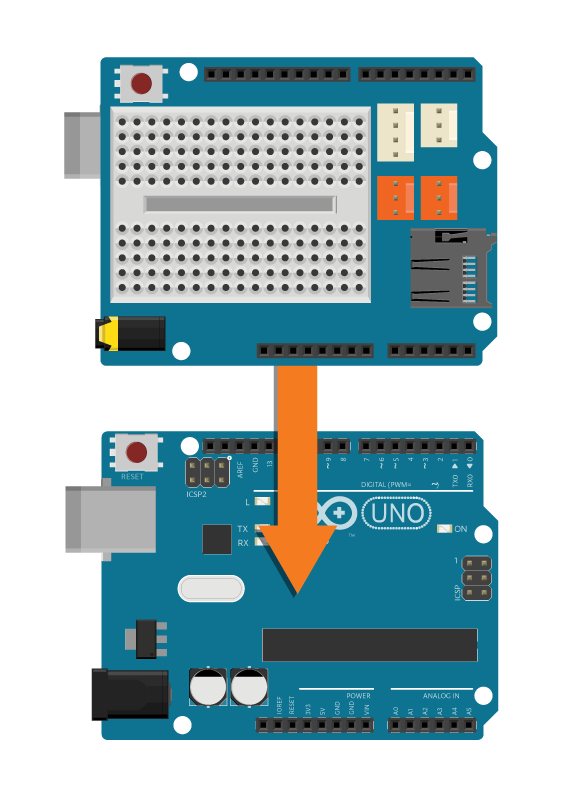
- Conecta el shield a la parte superior de Arduino.
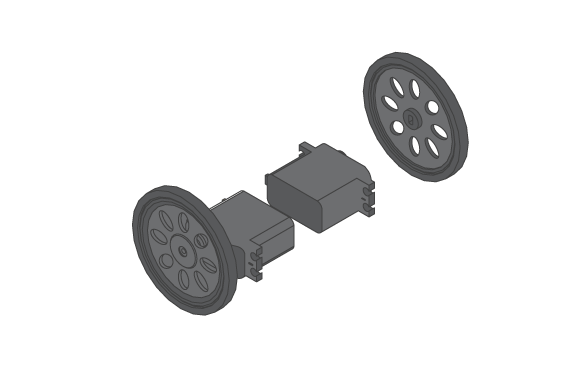
- Monta un servo a cada lado del Sigue Líneas.
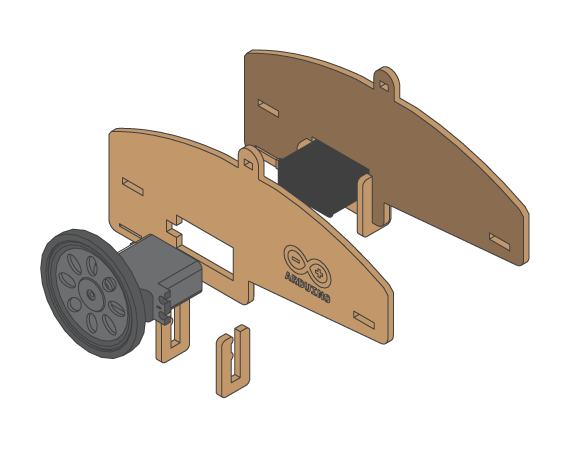
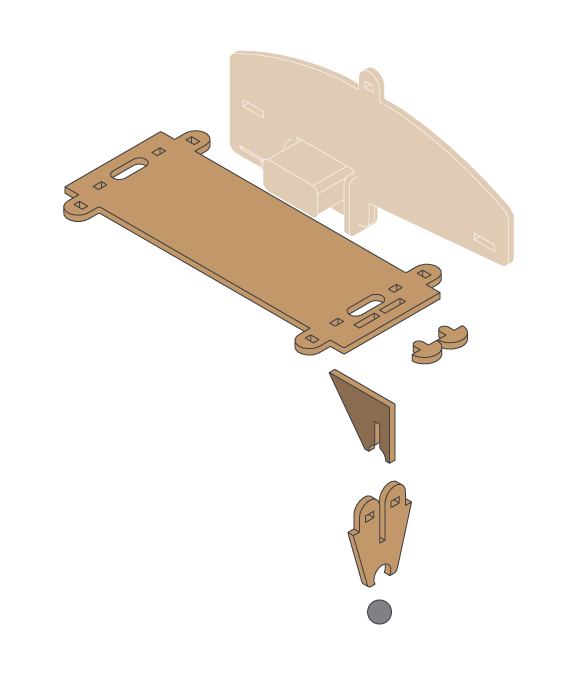
- Monta las piezas de la bola en la parte media del Sigue Líneas.
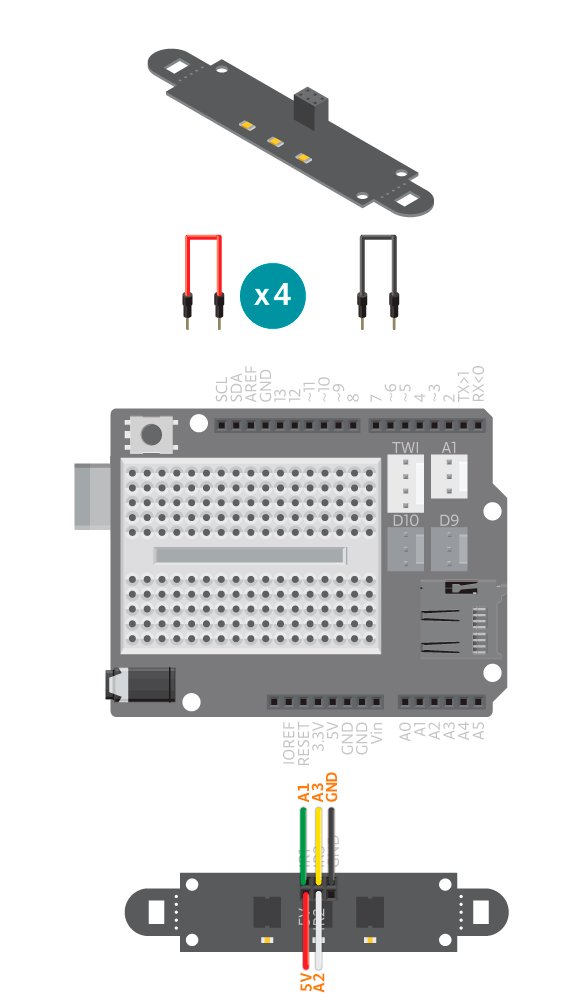
- Conecta cinco cables a to 5V, GND, IR1, IR2, y IR3 del IRArray.
- Pasa los cables por el agujero en frente del medio de la base y termina de montar el cuerpo principal.

- Conecta los cables sueltos del IRArray. 5V a 5V, GND a GND, IR1 a A1, IR2 a A2 y IR3 a A3.

- Utilizando tres cables, conecta el servo izquierdo. El cable negro a GND, el cable blanco al pin digital 10 y el cable rojo a la breadboard.

- Utilizando tres cables, conecta el servo derecho. El cable negro a GND, el cable blanco al pin digital 9 y el cable rojo a la breadboard.

- Conecta Arduino al ordenador y carga el ejemplo LineFollower.

- Conecta el portapilas 4 AA. El cable negro a GND y el rojo a los dos cables rojos de los servos en la breadboard.
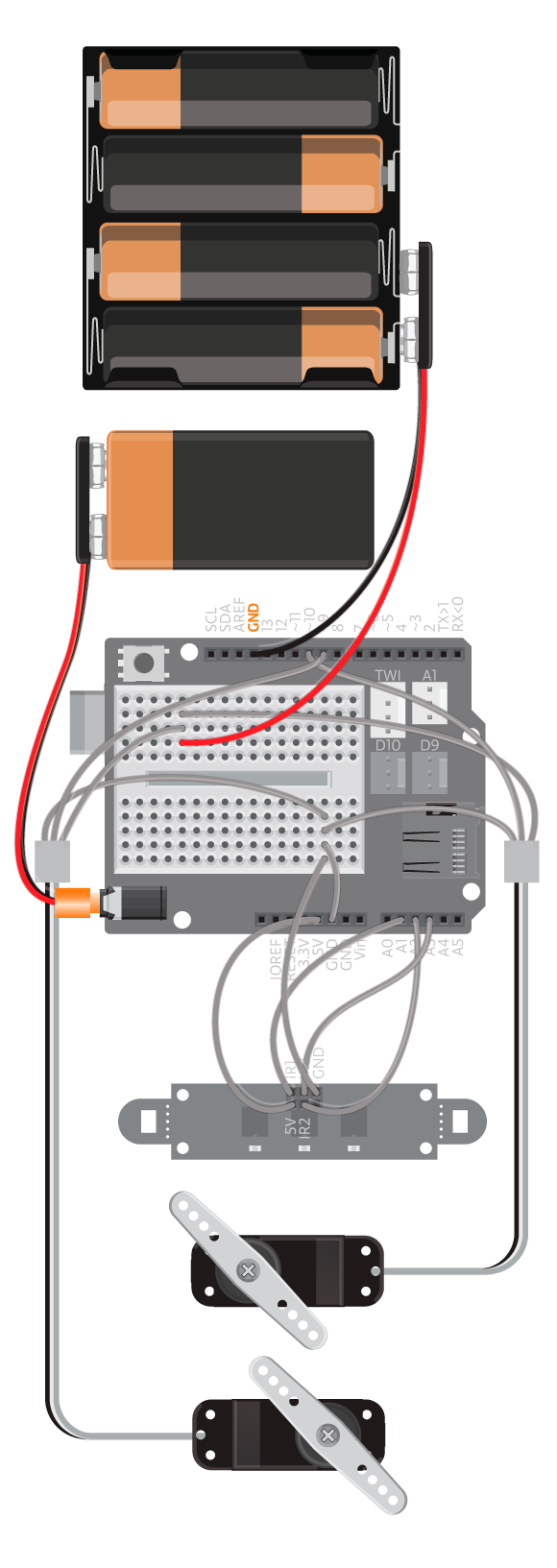
- Coloca el Arduino y la shield en la parte superior del Sigue Líneas y conecta la pila de 9V a Arduino.
Código
Puedes encontrar el código en Archivos -> Ejemplos -> EducationShield>Block4-Robots>Projects>LineFollower
¿Cómo funciona?
Los sensores IR en el IRArray pueden detectar blanco y negro. Utilizando el comandod readLine() obtenemos un valor entre -100 y 100 representando la dirección en que la línea se dirige. Este valor es luego usado para decir a las ruedas en qué dirección ir escribiendo wheels.follow(direccion).
¿No funciona?
- Revisa las ilustraciones y comprueba tus conexiones. Asegúrate de que todos los cables están firmemente conectados.
- ¿Los motores no funcionan? Mira la referencia para corregir los servos usandos como ruedas.
- Corrige el IRArray, mira la referencia para corregir el IRArray.
¡Sigue experimentando!
- Imprime una pista y construye obstáculos para el robot. Si los obstáculos son demasiado difíciles, piensa si hay alguna forma para mejorar el funcionamiento del robot modificando las ruedas.
- Haz que el robot reacciones de una forma especial cuando “ve” sólo blanco. Es decir, cuando haya perdido la línea negra.