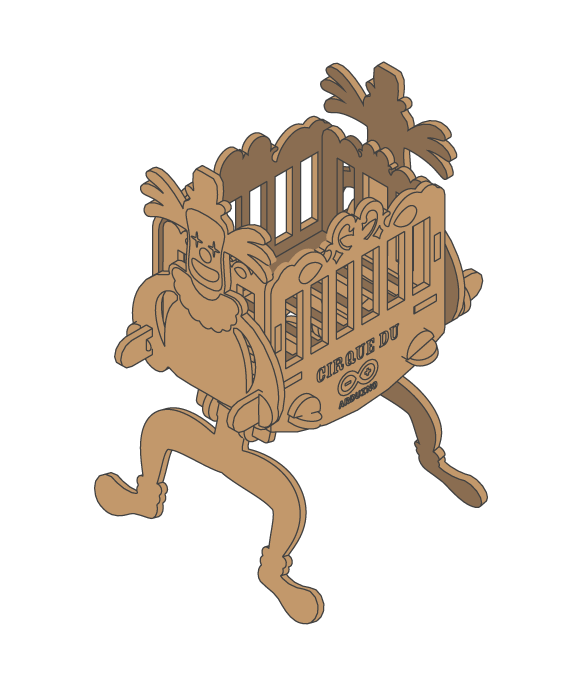
Aquest petit robot pot gatejar. No pot fer res més, i tampoc no és gaire bo en això, però és molt bonic i divertit.
Materials
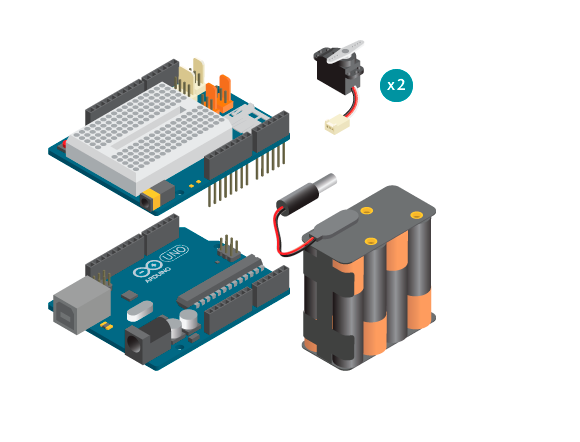

- 1 placa Arduino U
- 1 Shield Bàsica Educativa
- 2 motors servo estàndards
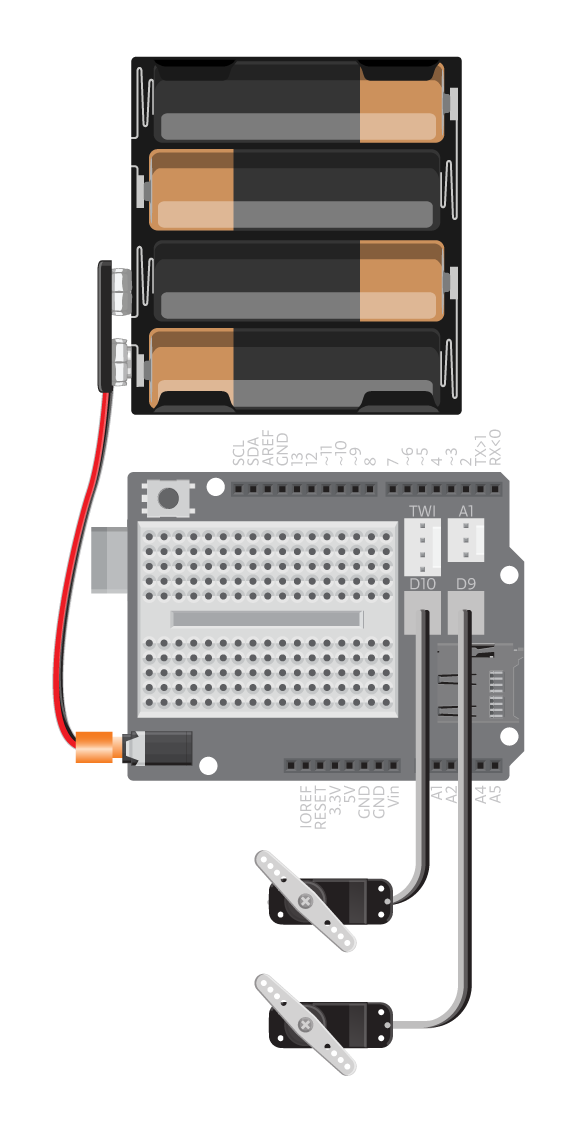
- 8 piles AA
- 1 Portapiles
- 1 Connector a corrent
- 1 kit robot gatejador
Instruccions
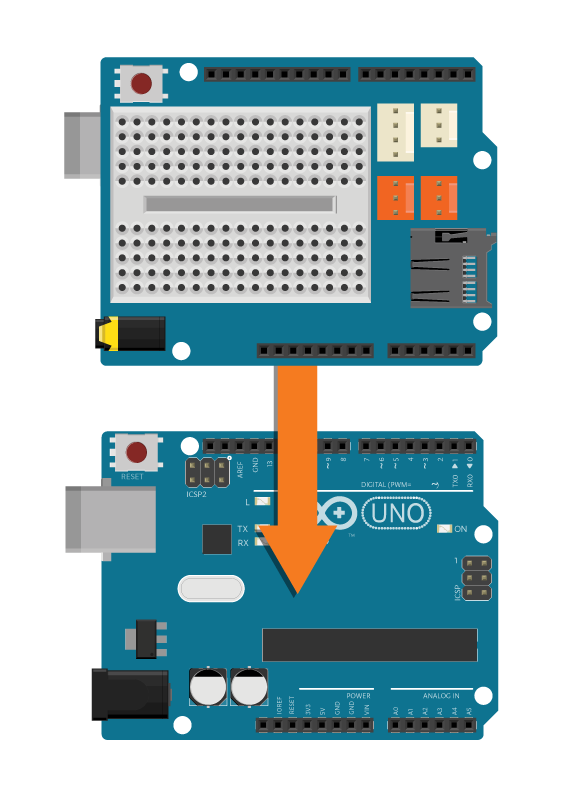
- Connecta la Shield a la part superior de la teva placa Arduino.
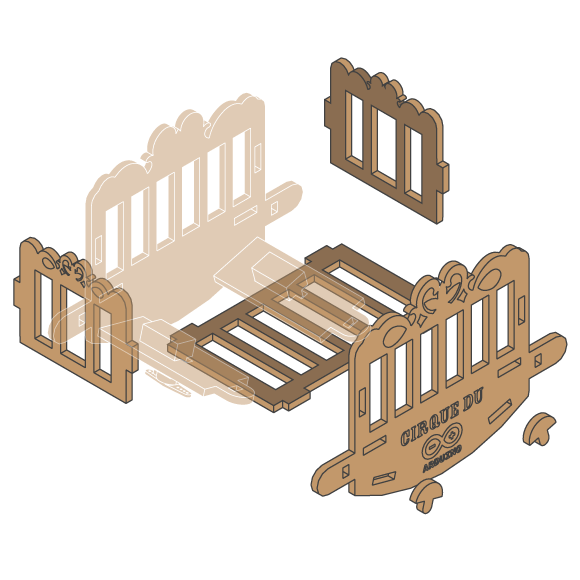
- Munta el robot gatejador.
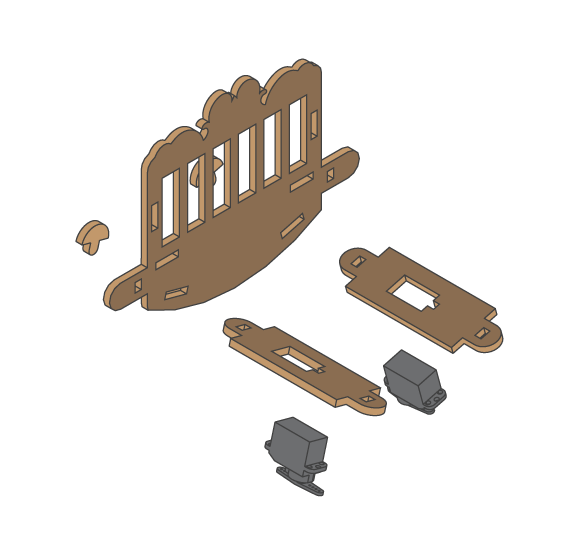
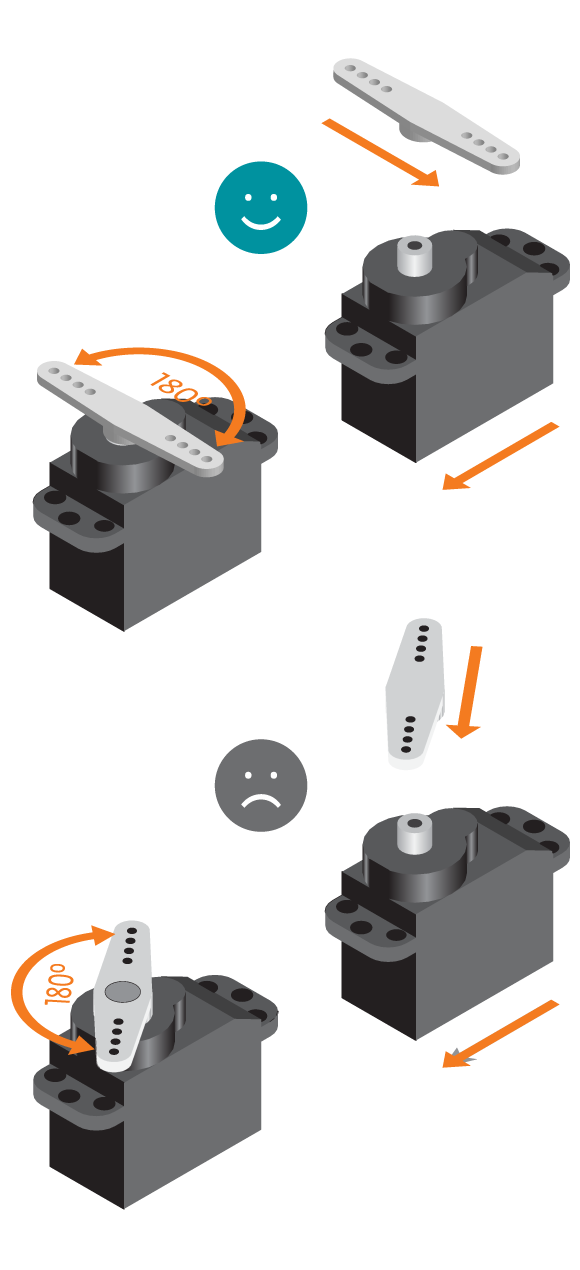
- Gira el servo a mà fins que arribi al final. A continuació, separa i torna a col·locar el braç del servo per tal que tingui la longitud del servo. Fes això a ambdós servos, davanters i posteriors.
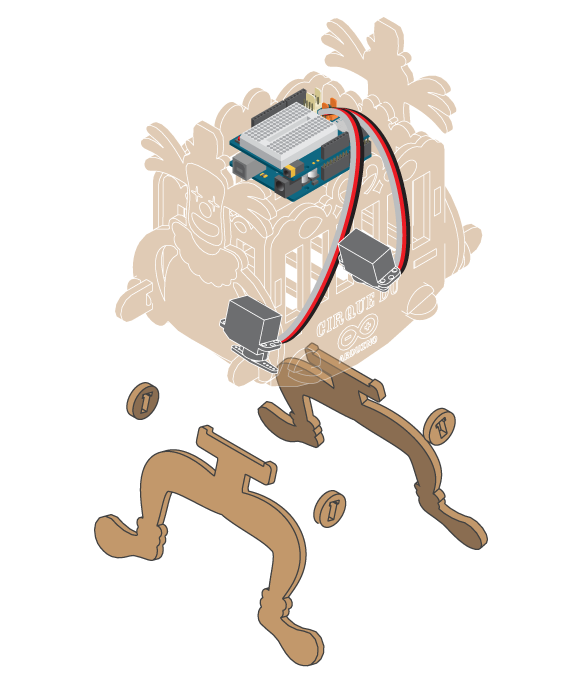
- Munta un motor a cada forat del servo i subjecta les cames als eixos dels servos.
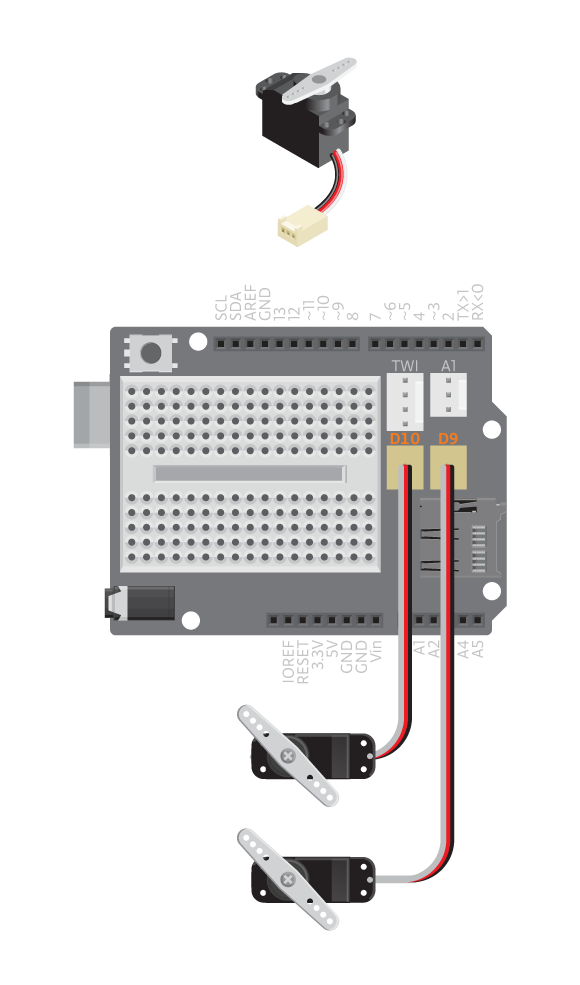
- Connecta el servo davanter al Pin D9. Connecta el servo posterior al Pin D10.
- Puja l’exemple CrawlingRobot.
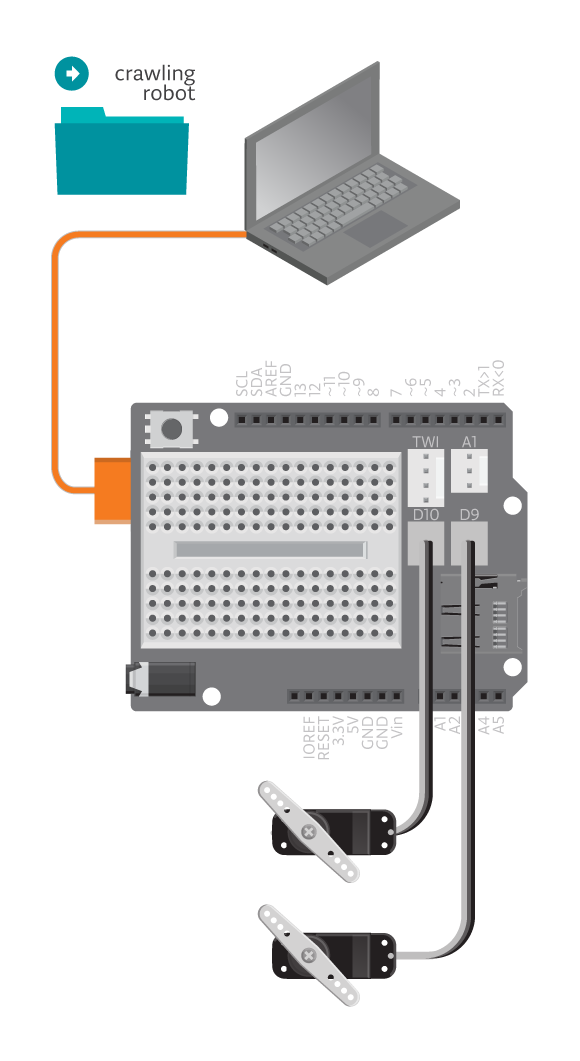
- Desconnecta el teu Arduino de l’ordinador i col·loca’l al “cos” del robot gatejador.
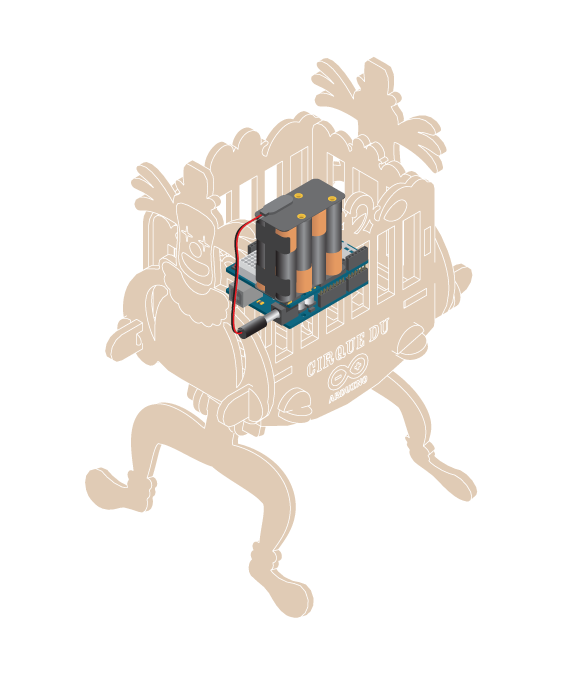
- Connecta la pila de 9V al portapiles i connecta’l al jack d’alimentació de l’Arduino.
Codi
Pots trobar el codi a: Arxiu -> Exemples -> BasicEducationShield -> Robots -> CrawlingRobot
Com funciona
La posició dels servos frontals està ajustada a 120 graus. Esperem 200 milisegons i després es canvia la posició dels servos del darrera a 60 graus. És a dir, l’angle oposat a la part frontal. Després d’uns altres 200 milisegons, establim la posició del servo frontal a 60 graus. De nou 200 milisegons més tard, ajustem el servo a la posició oposada.
No funciona?
- No estan funcionant els servos? Funcionen quan l’Arduino està connectat a l’ordinador però no en utilitzar la pila? Si és així, intenta canviar la pila.
- Segueix sense funcionar? Assegura’t que has connectat els servos correctament. Prova d’establir diferents angles per a cadascun d’ells, d’un en un, amb l’exemple Arxiu -> Exemples -> BasicEducationShield -> Help -> StandardServo.
Continua experimentant!
- Vols que el robot faci passos més grans o més petits? Intenta canviar els angles.
- Vols que el robot gategi més ràpidament o més lenta? Intenta canviar els temps de
delay. - Prova a veure de quantes maneres diferents pots fer que el robot s’arrossegui i quina és la més eficient.