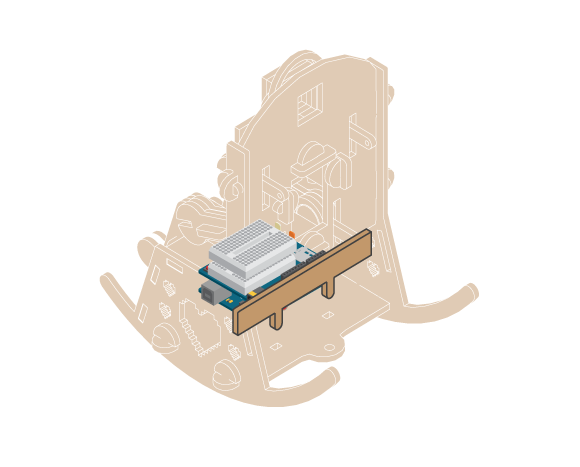
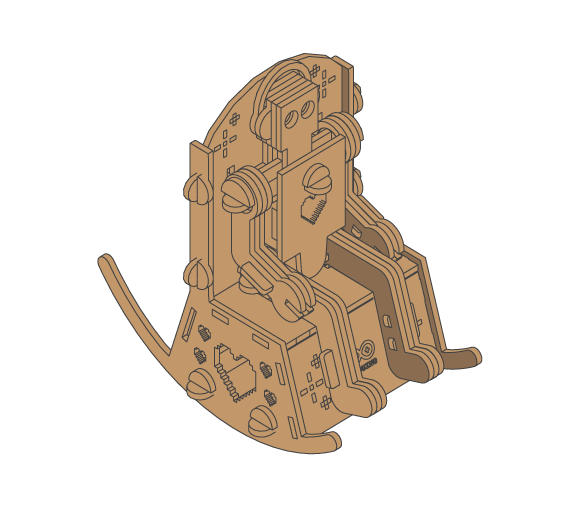
Aquest és un robot normal que té pessigolles en un balancí. Si ho penses bé, no sona en absolut normal. Fes-li pessigolles al cor i començarà a bellugar-se com boig.
Materials
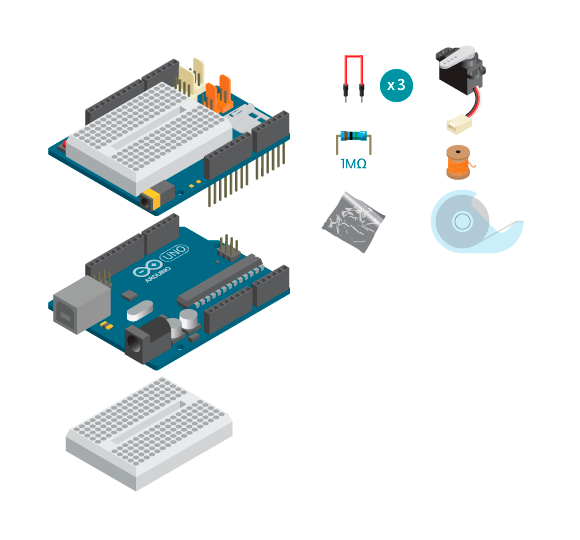
- 1 placa Arduino U
- 1 Shield Bàsica Educativa
- 1 servo estàndard
- 1 resistència d’1MOhm
- 3 cables
- paper d’alumini
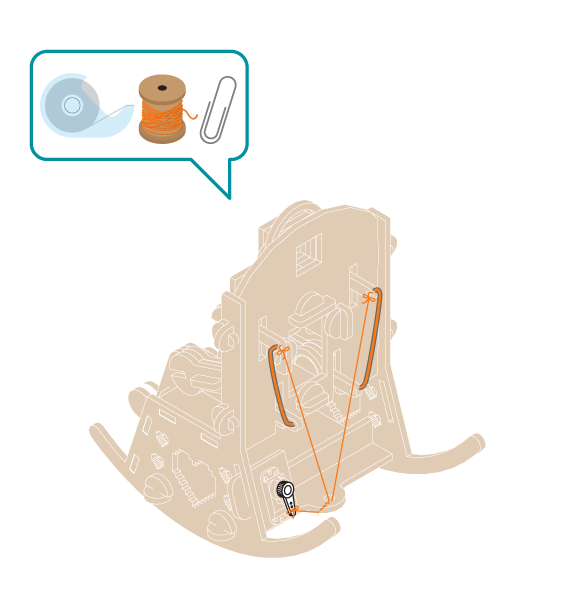
- cinta adhesiva
- corda
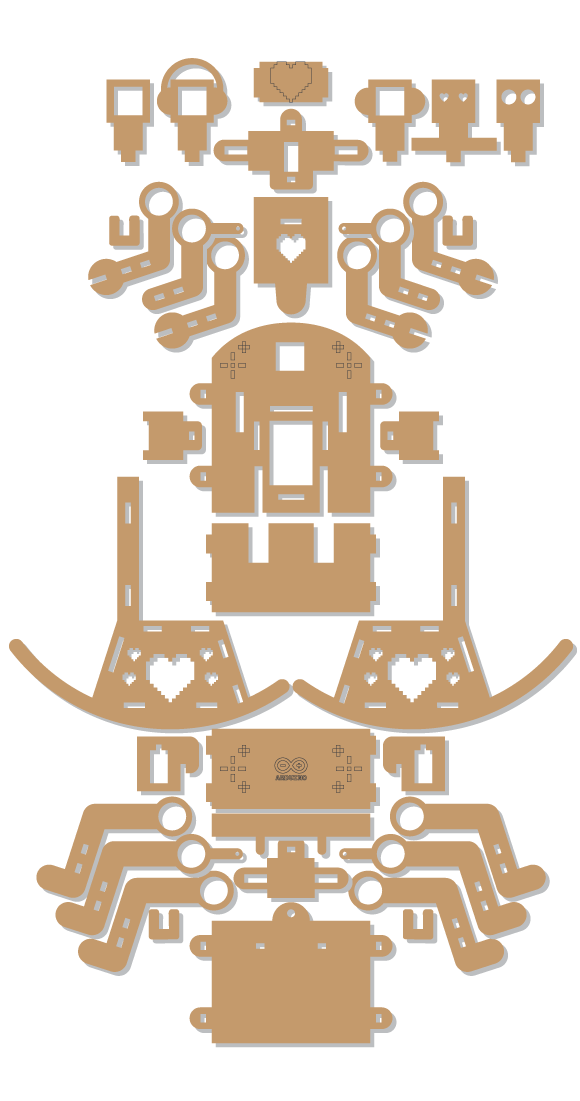
- 1 kit TickleRobot
- 1 breadboard petita
Instruccions
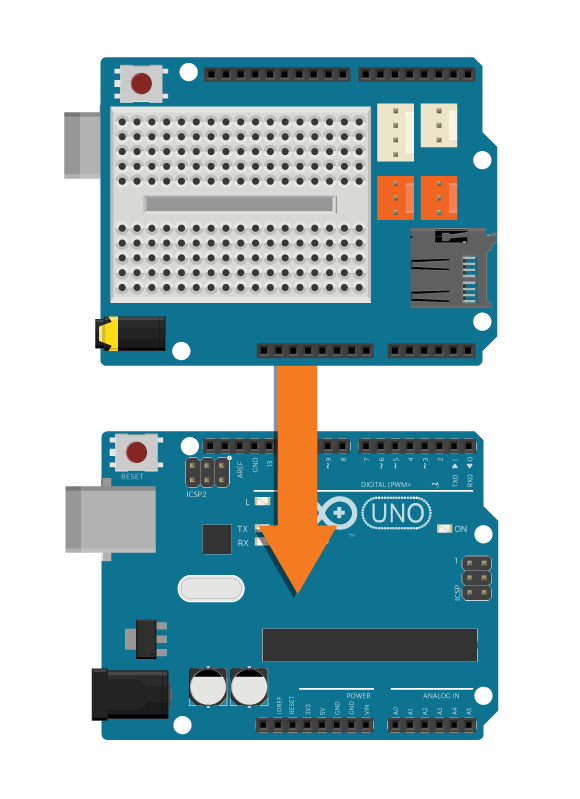
- Connecta la Shield a la part superior de la teva placa Arduino.
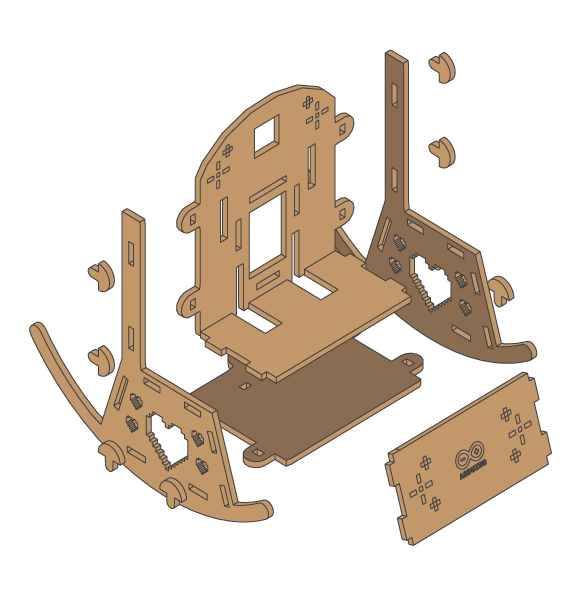
- Construeix el TickleRobot.

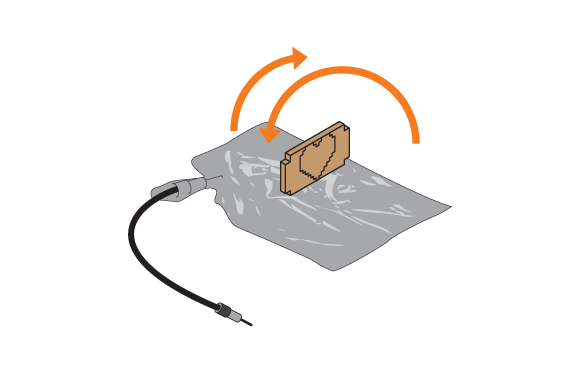
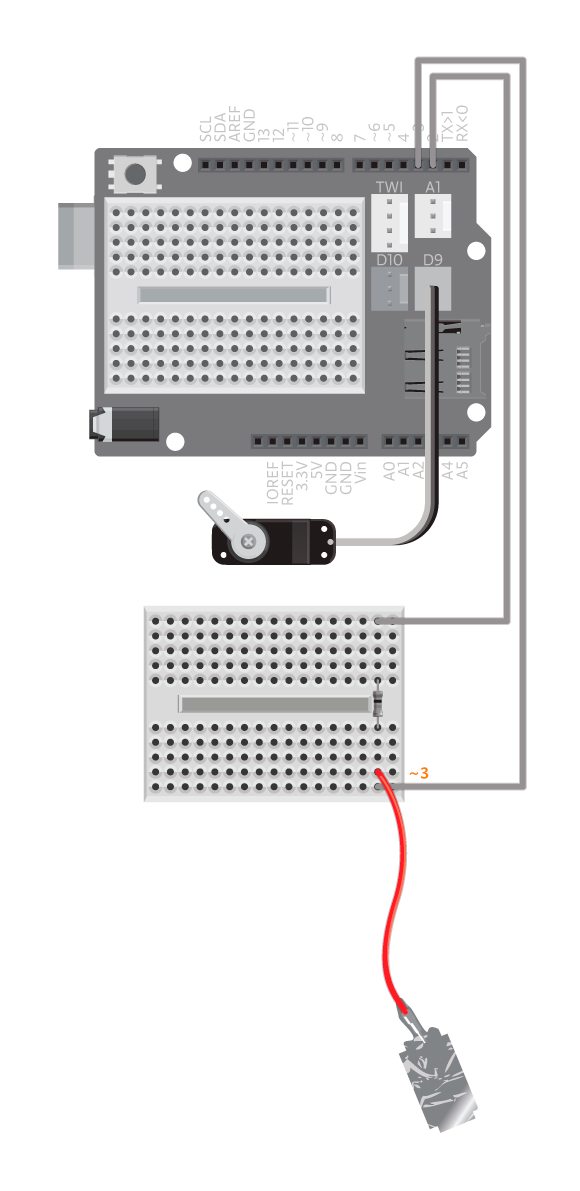
- Fes un sensor de contacte tallant una tira de paper d’alumini. Embolica el paper entorn del cor de la placa del TickleRobot. Utilitza cinta adhesiva entorn de les cantonades per tal que es mantingui. Des de la part posterior de la placa del cor, embolica el paper d’alumini a un cable solt –el cable metàl·lic ha d’estar en contacte amb el paper d’alumini. Enganxa la connexió fermament.
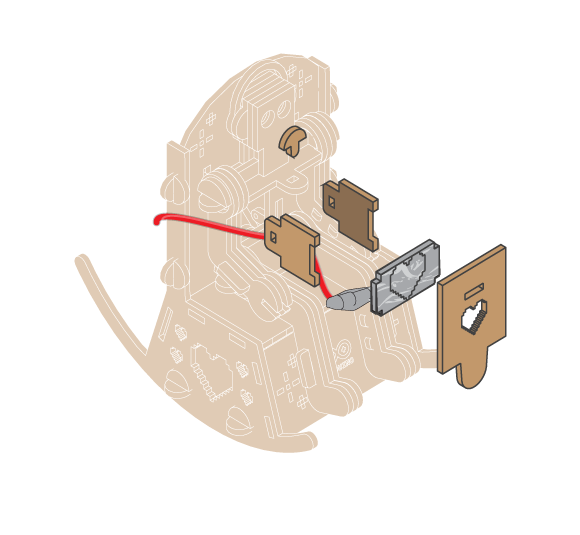
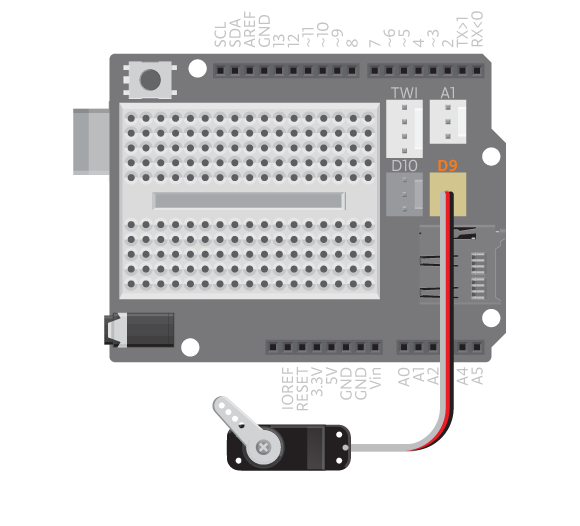
- Connecta el cable del servo al Pin D9.
- Connecta una resistència d’1Mohm entre el Pin digital 2 i el Pin digital 3.
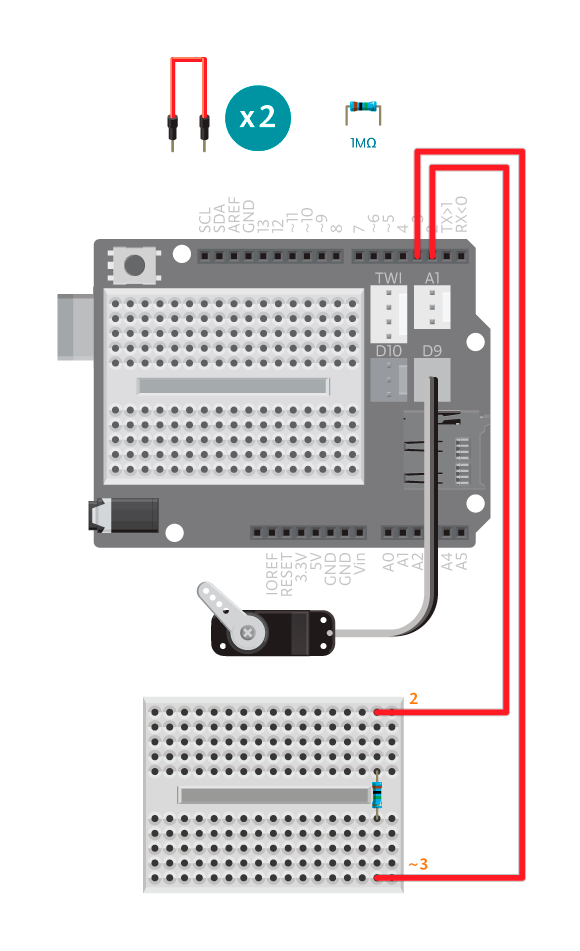
- Connecta el cable solt del sensor capacitatiu al Pin digital 3.
- Connecta el teu Arduino a l’ordinador. Comprova que la llibreria CapacitiveSensor està instal·lada dins de les llibreries de la teva carpeta sketchbook/libraries. Puja l’exemple Arxiu -> Exemples -> BasicEducationShield -> Robots -> TickleRobot. Comprova que el servo es mou quan toques el sensor capacitatiu.

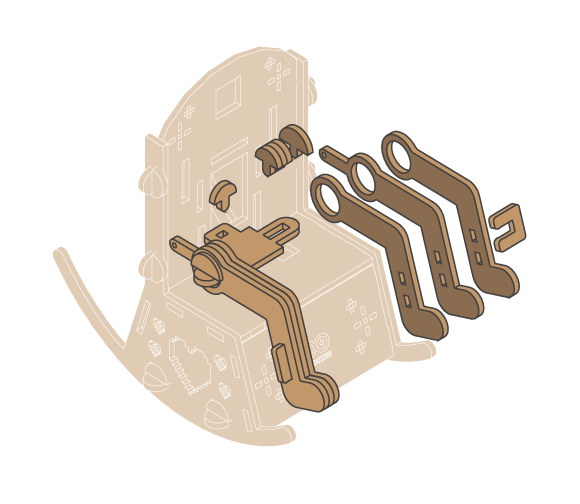
- Col·loca l’electrònica a la part inferior del TickleRobot i encaixa el servo a la part esquerra.
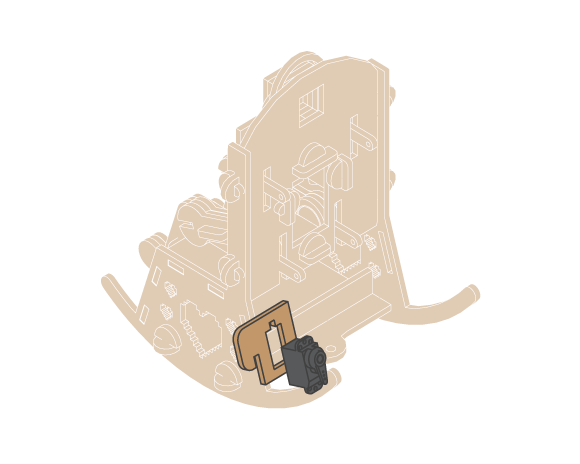
- Gira el servo a mà fins a arribar al final del seu recorregut. Gira’l a mà fins a la posició de 90 graus. Fixa el braç amb forma de barra al llarg del servo.

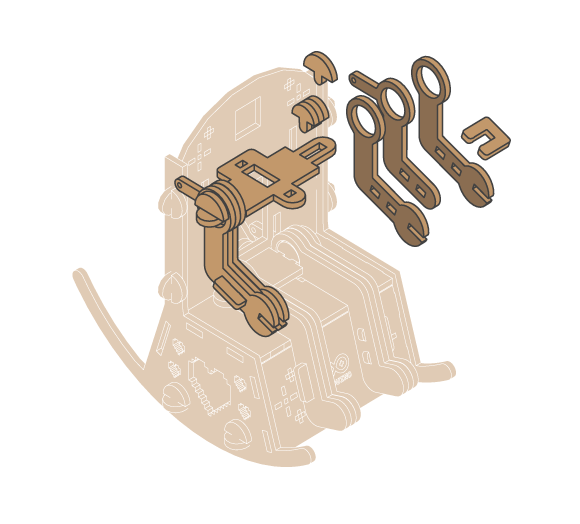
- Lliga un fil al braç i la cama esquerra, a través del forat extrem del braç del servo. Fes el mateix amb el braç i la cama dreta i lliga’ls al mateix lloc.
Codi
Pots trobar el codi a: Arxiu -> Exemples -> BasicEducationShield -> Robots -> TickleRobot
Com funciona
Quan el sensor de contacte detecta que és tocat, el servomotor es mou fins un determinat angle per tal que el ninot aixequi els braços i les cames. Quan el sensor no detecta el toc, el servo es mou cap a un altre angle que fa que el ninot abaixi els braços i les cames.
No funciona?
- No reacciona a les pessigolles o el servo no es mou cap a l’angle correcte? Primer, mira la referència del Servo Estàndard per tal de corregir-ne els errors. Si encara no funciona, mira la referència del Sensor Capacitiu per tal de corregir-ne el sensor de tacte.
- No pots pujar el codi? Comprova que la llibreria CapacitiveSensor està situada dins de la carpeta de libraries als teus ketchbook.
Continua experimentant!
- Pots fer que el TickleRobot balli d’una manera predeterminada? Fes-lo ballar just després de tocar-lo.
- Intenta afegir un altre servo per tal que pugui fer moviments de ball més avançats! Fes que el robot mogui la cadira per si mateix! Usa el sensor capacitatiu per activar-lo i desactivar-lo.
- Fes que el robot mogui la cadira per si mateix! Utilitza el sensor capacitatiu per activar-lo i desactivar-lo.