Per controlar els motors, usaràs la placa Arduino. Bàsicament, qualsevol objecte electrònic que hagis vist o coneguis té alguna peça en moviment. Per exemple: impressores, cotxes de joguina, raspalls de dents elèctrics, etc.; tots contenen motors. N’hi ha de molts tipus, però principalment en trobaràs tres:
Motors DC (corrent continu):
Si necessites que quelcom giri però sense precisió, aquest és el teu motor. Per trobar un motor DC a la vida real, busca el ventilador que es troba dins del teu ordinador. També pots trobar-ne un de molt petit al teu telèfon mòbil. El motor DC és el que fa que el teu telèfon vibri, tot fent girar un bloc de metall el pes del qual està distribuït de manera no uniforme.
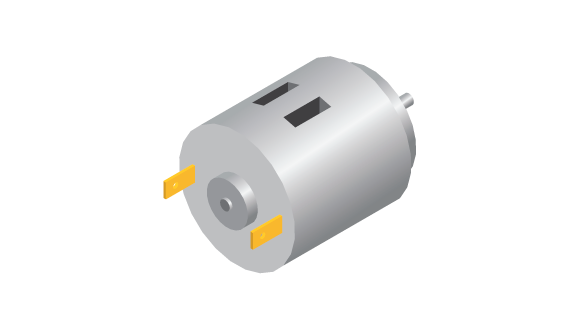
Un motor DC pot funcionar lliurement en ambdues direccions; és molt fàcil controlar-ne la velocitat però no la posició. Tampoc no és senzill aturar-lo de forma precisa. Ve amb dos cables: alimentació i terra. Per norma general, un motor DC no pot ésser alimentat directament del corrent que proporciona un Pin digital Arduino.
El cables es poden connectar a terra (GND) o a un Pin digital. Per tal de fer-lo girar, estableix el Pin digital a HIGH i, perquè s’aturi, posa el Pin digital a LOW. Perquè giri en sentit contrari, canvia l’ordre dels cables.
És possible controlar la velocitat d’un motor DC des d’Arduino amb una tècnica anomenada PWM, utilitzant un transistor. Amb varis transistors disposats en un pont H, pots fins i tot controlar-ne la direcció sense haver de desconnectar el motor.
Motors pas a pas:
Els motors pas a pas poden trobar-se en qualsevol objecte electrònic on la precisió sigui prioritària, com ara escàners i impressores. A diferència del motor DC, un motor pas a pas pot ésser molt precís tant en posició com en velocitat.
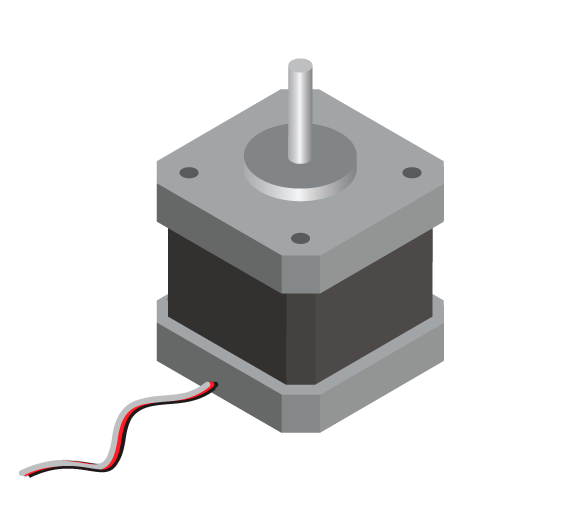
La rotació completa dels motors pas a pas es divideix en passos equitatius. Pots controlar la parada del motor en cadascun d’aquests passos. Els passos es mesuren en graus, normalment 1.8, 3.6 o 7.2. Quant més petits siguin els passos, més precís serà. Això fa que sigui molt útil quan es necessita un posicionament repetit.
Tanmateix, el motor pas a pas mai no serà molt ràpid. Un motor pas a pas té 4 o més cables. Generalment, necessites més de 5 volts per tal d’alimentar un motor pas a pas, fet que implica que no es pot alimentar directament des de l’Arduino. Ara bé, podem utilitzar una font d’alimentació externa per alimentar el motor i controlar-lo des de l’Arduino a través del transistor.
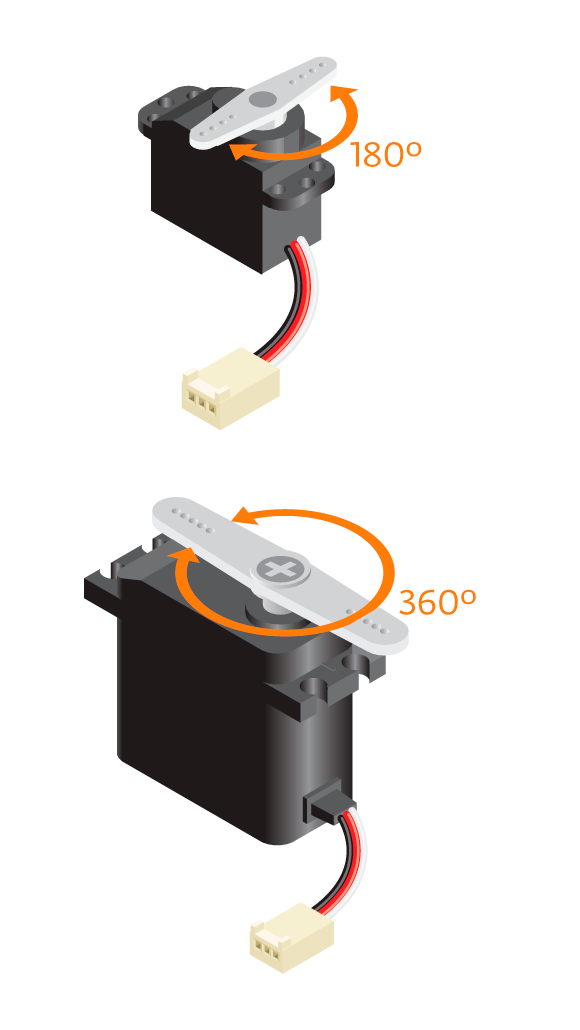
Servomotors
Els servomotors són abastament usats en robòtica i en ràdio-control. Aquest tipus de motors són els que utilitzaràs aquesta setmana, ja que són molt senzills de controlar i connectar des de l’Arduino.
Tenen tres cables: un per l’energia, l’altre per terra i l’altre per controlar-los. Hi ha dos tipus de servomotors: rotació estàndard i rotació contínua. L’estàndard pot girar 180 graus i pot ésser controlat com el motor pas a pas: a una posició precisa. Igual que el motor DC, la rotació contínua pot rotar en ambdues direccions, però no tan ràpidament. En canvi, pots controlar tant la velocitat com la direcció sense haver d’usar transistors.