Aquesta setmana construirem robots. Fareu grups i construireu diferents màquines a partir de motors. La funció bàsica d’aquests motors és molt senzilla, però veuràs que, segons com els utilitzis, pots animar els elements de maneres molt diferents. Cada grup farà el seu propi robot i al final de la setmana l’ensenyareu a la resta de la classe.
Primer de tot començarem amb una introducció als diferents tipus de motors que existeixen i veurem alguns exemples de com utilitzar-los.
Per controlar els motors, usaràs la placa Arduino. Bàsicament, qualsevol objecte electrònic que hagis vist o coneguis té alguna peça en moviment. Per exemple: impressores, cotxes de joguina, raspalls de dents elèctrics, etc.; tots contenen motors. N’hi ha de molts tipus, però principalment en trobaràs tres:
Continua llegint →
Comencem comprovant com funciona el servomotor estàndard
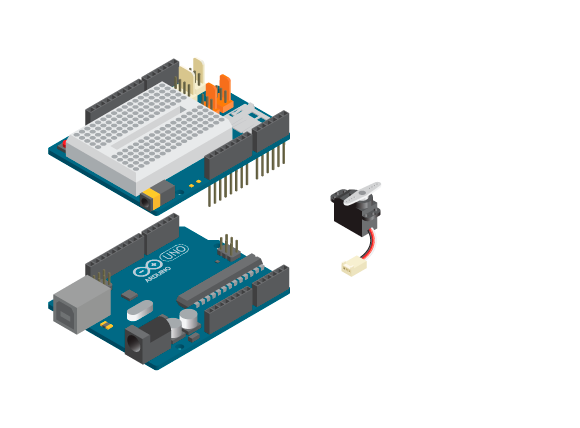
Connecta’l al Pin D9.
Continua llegint →
El servo continu té el mateix aspecte que un servo estàndard, però és capaç de girar contínuament com un motor normal. No és possible controlar quin angle està assenyalant, però pots especificar la rapidesa amb què vols que giri i en quina direcció ho ha de fer.
Intentem utilitzar una entrada per tal de controlar el servo. En aquest exemple, utilitzarem un potenciòmetre.
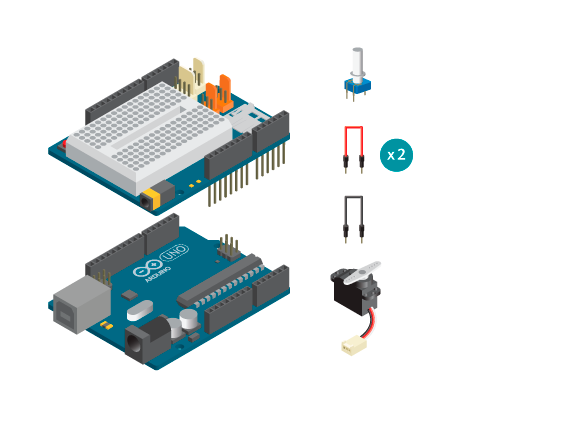
Connecta el Pin central del potenciòmetre a l’entrada analògica A0. Connecta un dels altres Pins a 5V i l’últim Pin a terra (GND). Connecta un servo estàndard al Pin D9.
Continua llegint →
Quan utilitzis dos servos a la vegada, la teva placa Arduino pot tenir problemes amb el fet de donar-los el corrent suficient. Hi ha diferents tècniques per controlar això. Aquí exploraràs la tècnica d’escriure senyals als servos per separat. Aquest control el faràs des del teu programa.
Continua llegint →