El servo estàndard és un tipus de motor que té un angle limitat de rotació (generalment 180º), i que permet controlar exactament en quin angle s’atura.
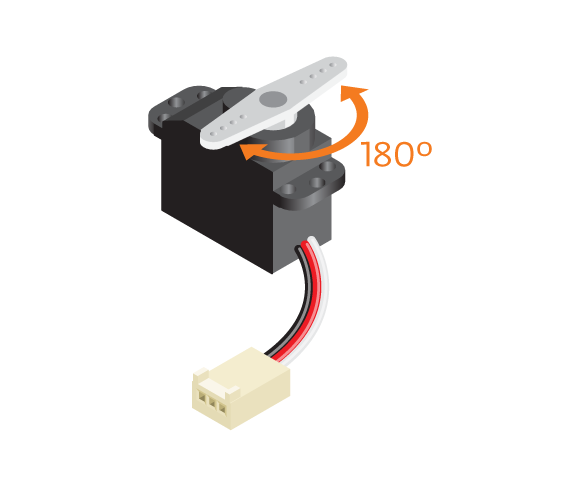
El que t’ha estat proporcionat pel projecte Educació Bàsica és més semblant a un microservo. Actua de la mateixa manera que un servo normal, però és més petit i menys potent en girar.
Materials
- 1 placa Arduino U
- 1 Shield Bàsica Educativa
- 1 servo estàndar
Instruccions
- Connecta el servo al port digital 9 del TinkerKit.
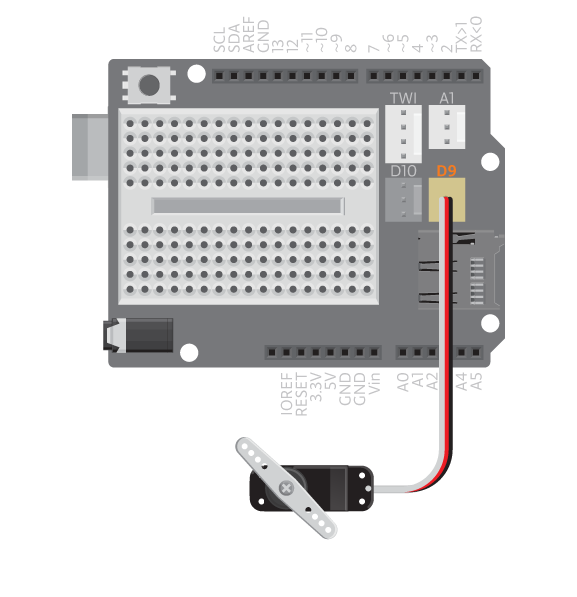
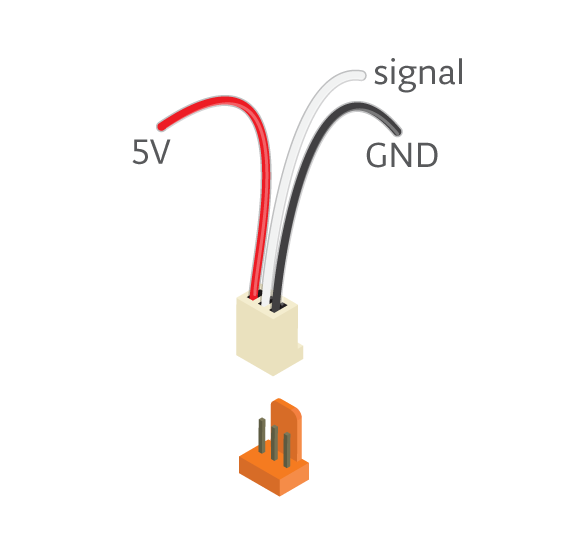
- Comprova que la direcció de la connexió és correcta: si estàs sostenint la Shield amb la breadboard cap a tu, el cable negre del connector ha d’estar al costat dret.
Obre des de l’Arduino Arxiu -> Exemples -> BasicEducationShield -> Help -> ServoEstándar.
/*
StandardServo
*/
#include <BasicEducationShield.h>
#include <Servo.h>
Servo me;
void setup(){
//Servo is initialized,
me.attach(9);
}
void loop(){
//Make the servo rotate to 76 degrees.
me.write(76);
}
Executa el programa i tindràs el servo apuntant a 76 graus. Canvia els graus al codi, puja’l de nou i veuràs com es mou cap a l’esmentada direcció.
Nota: Degut al disseny mecànic dels teus projectes, de vegades l’angle de gir permès pel servo és molt menor a 180 graus. Si veus que el braç del servo empeny amb força cap a altres parts del teu projecte, intenta abaixar el braç del servo i posa’l de nou en un angle més adient. Pot requerir varis intents fins que aconsegueixis posar-lo bé.
No funciona?
- Comprova que has connectat el servo al mateix Pin que el que has utilitzat al codi.