Cuando utilices dos servos a la vez, tu placa Arduino puede tener un problema con darles la suficiente corriente. Hay diferentes técnicas para controlar esto. Aquí vas a explorar la técnica de escribir señales a los servos por separado. Este control lo harás desde tu programa.
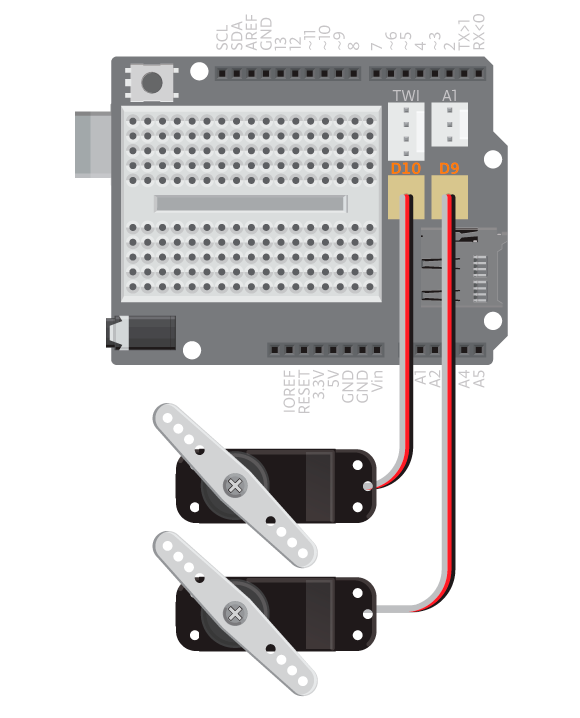
Conecta dos servos a la shield, uno a D9 y otro a D10.
Escribe el siguiente código en el IDE de Arduino:
El programa desconecta myservo2 cuando va a utilizar myservo1. Hace girar myservo1 un ángulo de 70 grados, espera 1 segundo y luego gira el mismo motor a 120 grados.
Del mismo modo, para hacer el mismo movimiento con myservo2 necesitas desconectar mysevo1 y conectar myservo2.
¡Sigue experimentando!
- Inventa un robot que use un motor de giro continuo y otro de giro estándar para que se mueva hacia adelante, ¿cómo lo harías?