Este es un robot normal con cosquillas en una mecedora. Si lo piensas bien, no suena nada normal. Hazle cosquillas en su corazón y empezará a menearse como loco.
Materiales
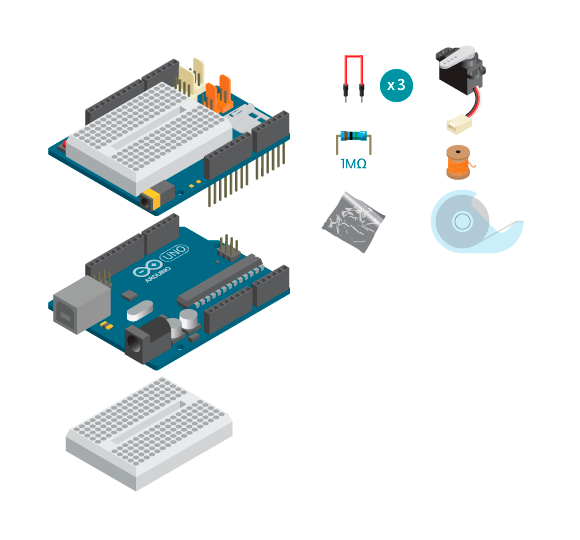
- 1 placa Arduino Uno
- 1 Shield Educativa
- 1 servo estándar
- 1 resistencia de 1MOhm
- 3 cables
- papel de aluminio
- cinta adhesiva
- cuerda
- 1 kit TickleRobot
- 1 breadboard
Instrucciones
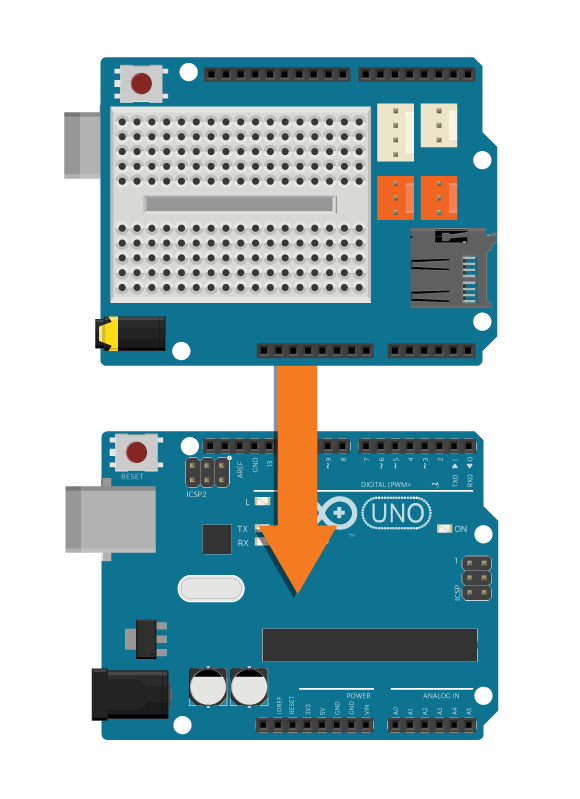
- Conecta la shield a la parte superior de tu placa Arduino.
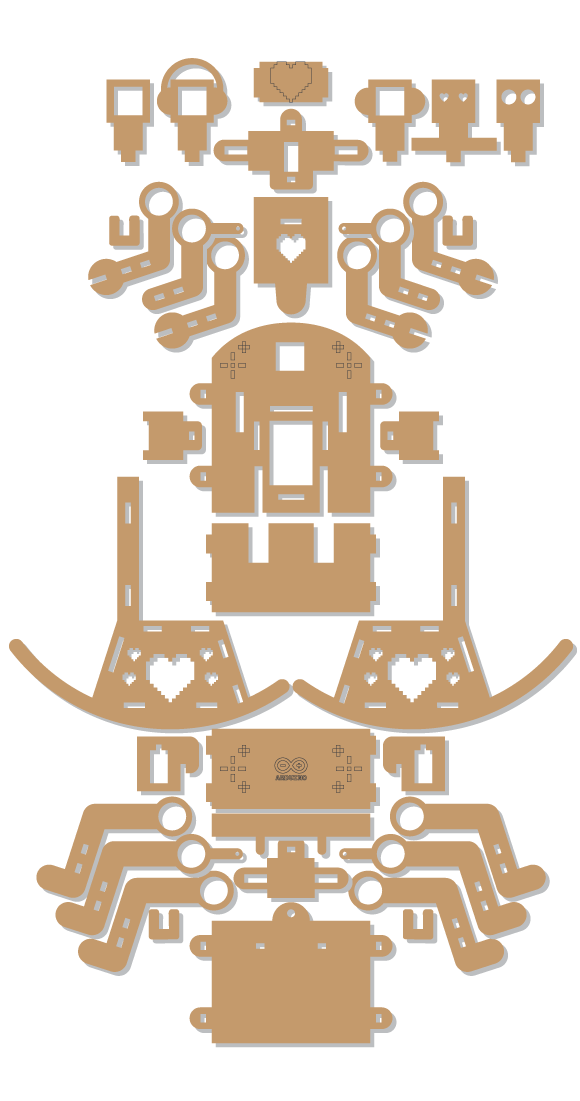
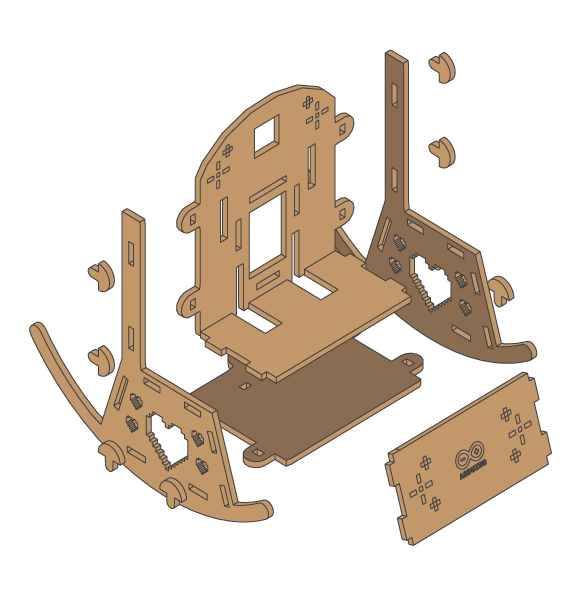
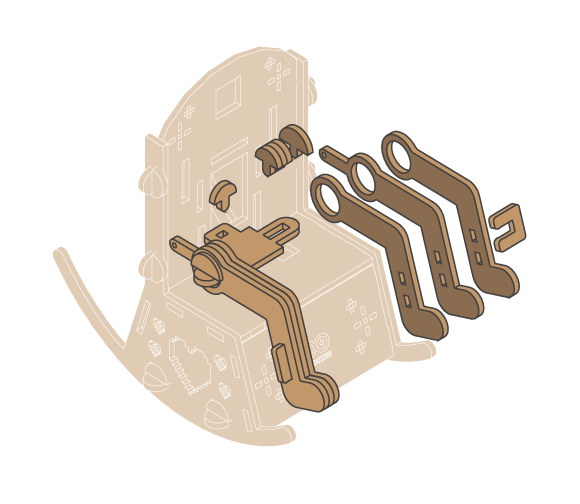
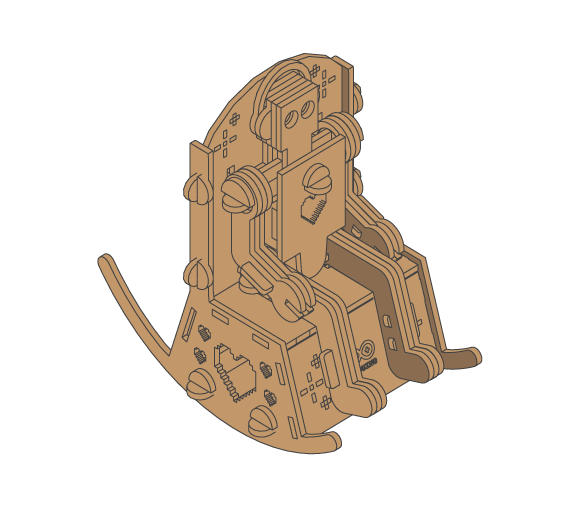
- Construye el TickleRobot.

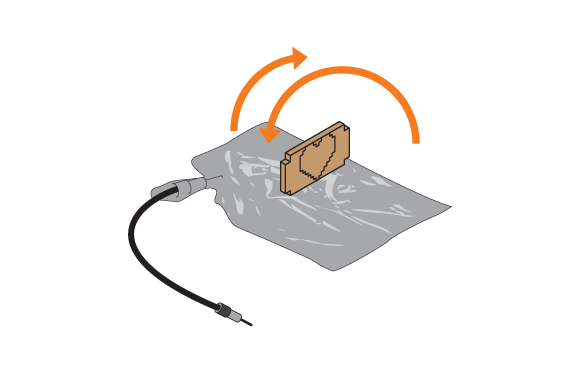
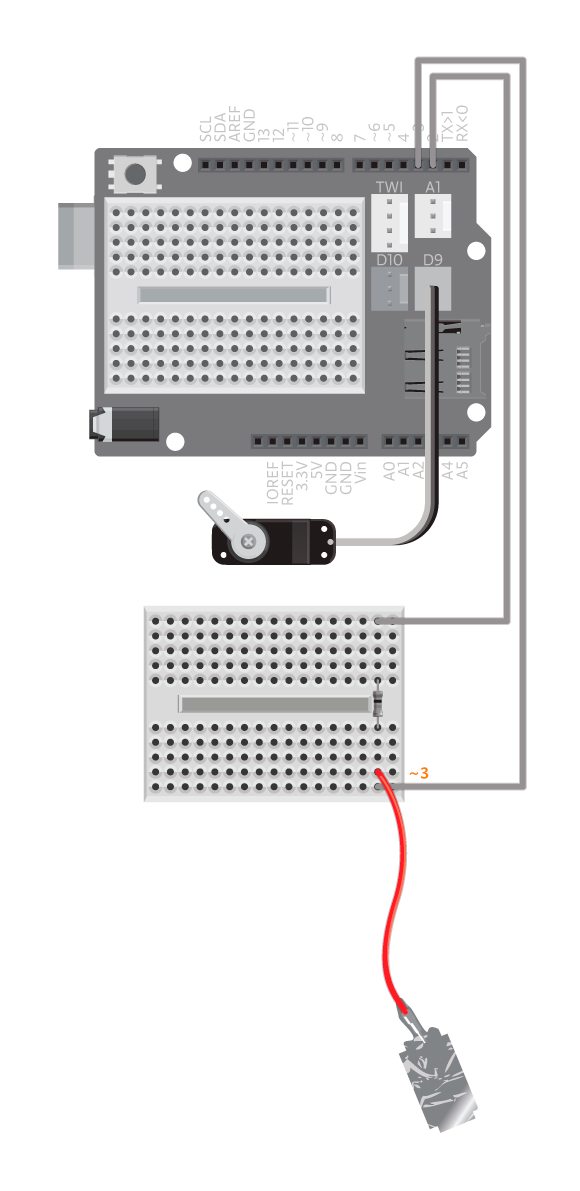
- Haz un sensor de contacto cortando una tira de papel de aluminio. Envuelve el papel alrededor del corazón de la placa de TickleRobot, utiliza cinta adhesiva alrededor de los bordes para que se mantenga. Desde la parte posterior de la placa del corazón, envuelve el papel de aluminio a un cable suelto -el cable metálico debe estar en contacto con el papel de aluminio-. Pega la conexión firmemente.
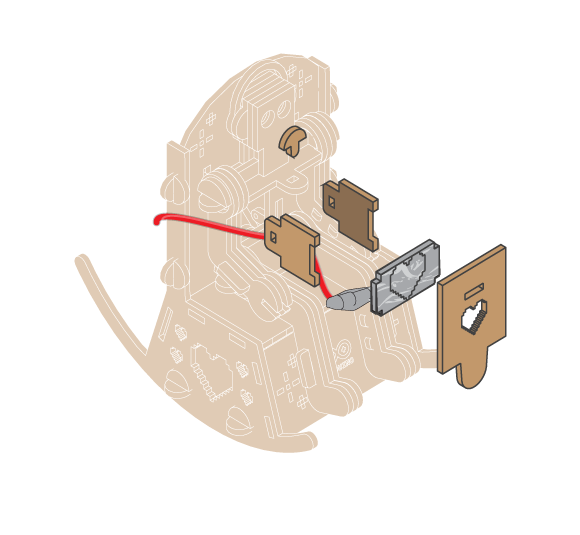
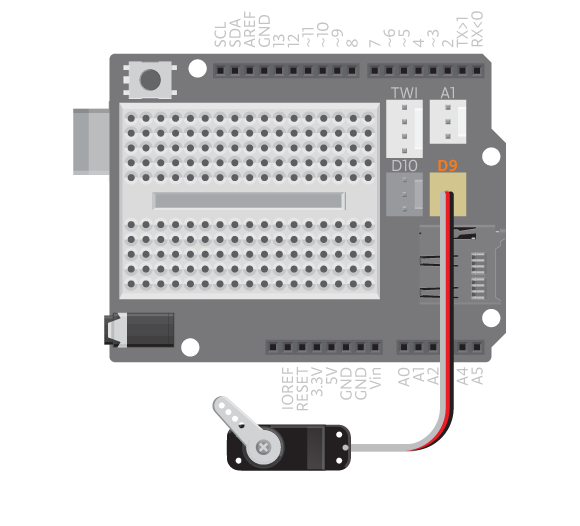
- Conecta el cable del servo al pin D9.
- Conecta una resistencia de 1Mohm entre el Pin digital 2 y el Pin digital 3.
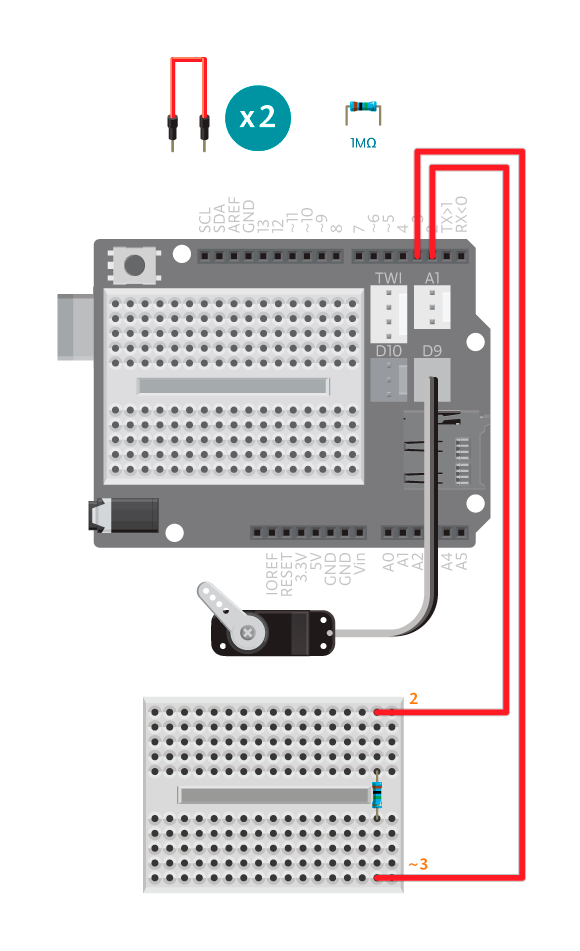
- Conecta el cable suelto del sensor capacitivo al Pin digital 3.
- Conecta tu Arduino al ordenador. Asegúrate de que la librería CapacitiveSensor está instalada dentro de las librerías de tu carpeta sketchbook/libraries. Carga el ejemplo Archivo -> Ejemplos -> BasicEducationShield -> Robots -> TickleRobot. Asegúrate de que el servo se mueve cuando toques el sensor capacitivo.

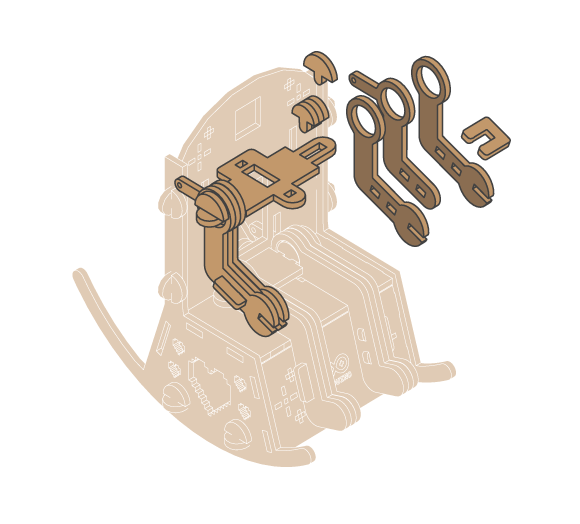
- Coloca la electrónica en la parte inferior del tickle robot y encaja el servo en la parte izquierda.
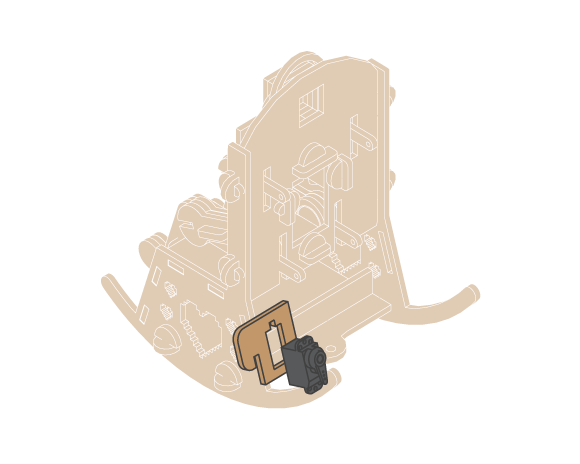
- Gira el servo a mano hasta llegar al final de su recorrido. Gíralo a mano hasta la posición de 90 grados. Fija el brazo con forma de barra a lo largo del servo.

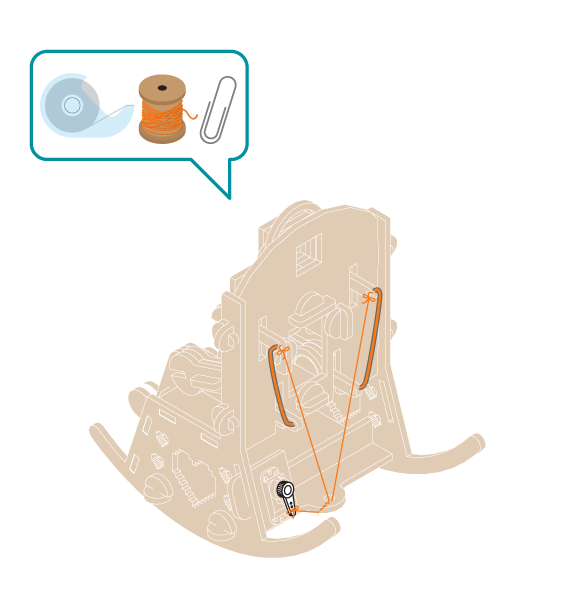
- Ata una hilo al brazo y pierna izquierda, a través del agujero extremo del brazo del servo. Haz lo mismo con el brazo y pierna derecha y átalos al mismo sitio.
Código
Puedes encontrar el código en: Archivo -> Ejemplos -> EducationShield>Block4-Robots>Projects>TickleRobot
Cómo funciona
Cuando el sensor de contacto detecta ser tocado, el servomotor se mueve hacia un determinado ángulo para que el muñeco levante sus brazos y piernas. Cuando el sensor no detecta el toque, el servo se mueve hacia otro ángulo que hace que el muñeco baje brazos y piernas.
¿No funciona?
- ¿No reacciona a las cosquillas o el servo no se mueve hacia el ángulo correcto? Primero, mira la referencia del Servo Estándar para corregir errores del mismo. Si todavía no funciona, mira la referencia del Sensor Capacitivo para corregir el sensor de tacto.
- ¿No puedes cargar el código? Asegúrate de que la librería CapacitiveSensor está situada dentro de la carpeta de libraries en tu sketchbook.
¡Sigue experimentando!
- ¿Puedes hacer que el TickleRobot baile de una manera predeterminada? Hazle bailar justo después de tocarlo.
- ¡Intenta añadir otro servo para que pueda hacer movimientos de baile más avanzados!
- ¡Haz que el robot mueva la silla por si mismo! utiliza el sensor capacitivo para activarlo y desactivarlo.