¡Espía a tu gato con esta cámara robótica! Monta la cámara espía y contrólala con un pequeño joystick. Puedes dirigir todo desde el ordenador y cuando veas algo sospechoso, ¡hazle una foto!
Materiales
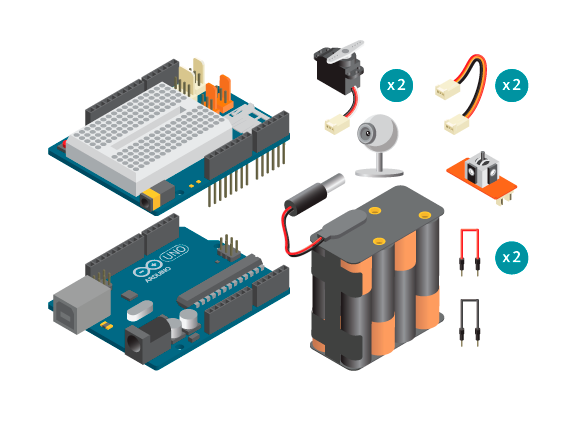

- 1 placa Arduino Uno
- 1 Shield Educativa
- 2 servomotores estándar
- 1 joystick TinkerKit
- 3 cables
- 2 conectores TinkerKit
- 1 cámara web
- 1 kit de cámara robótica
- 8 pilas AA
- 1 portapilas
- 1 conector a corriente
Instrucciones
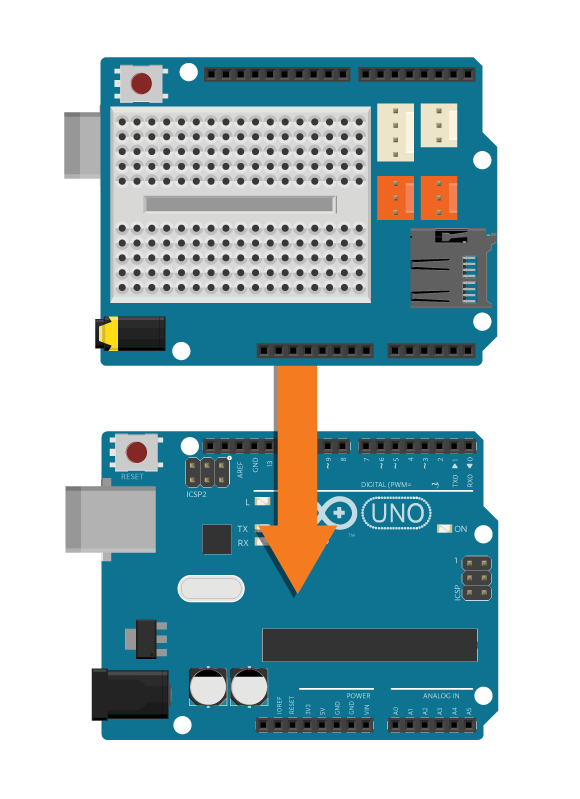
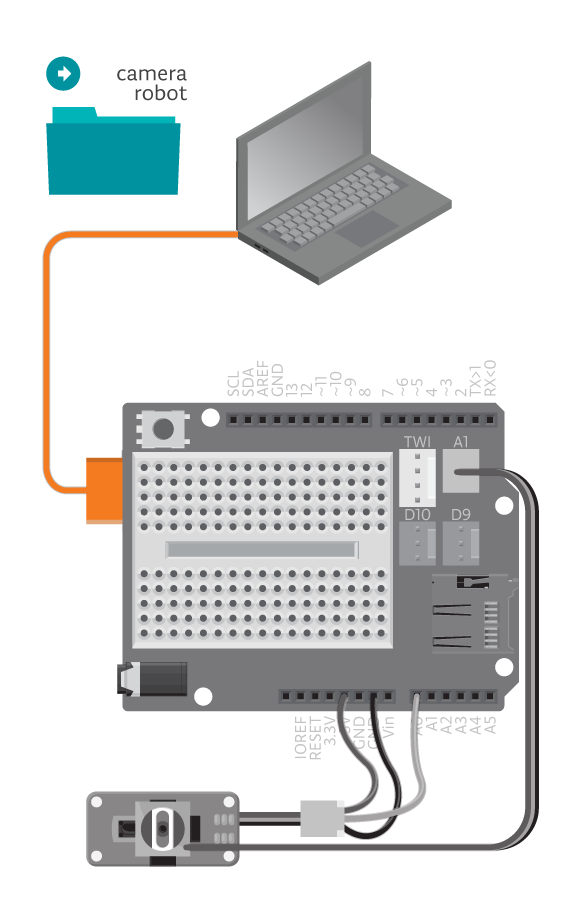
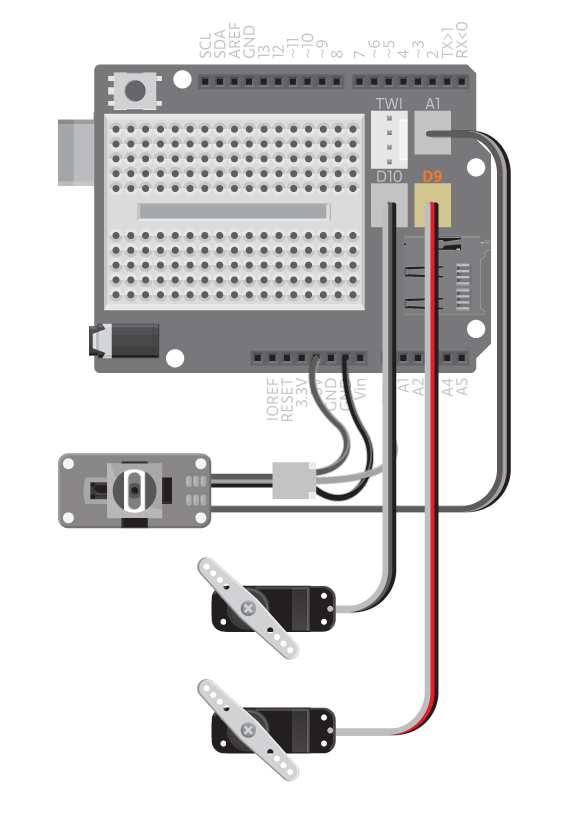
- Conecta la shield a la parte superior de tu placa Arduino.
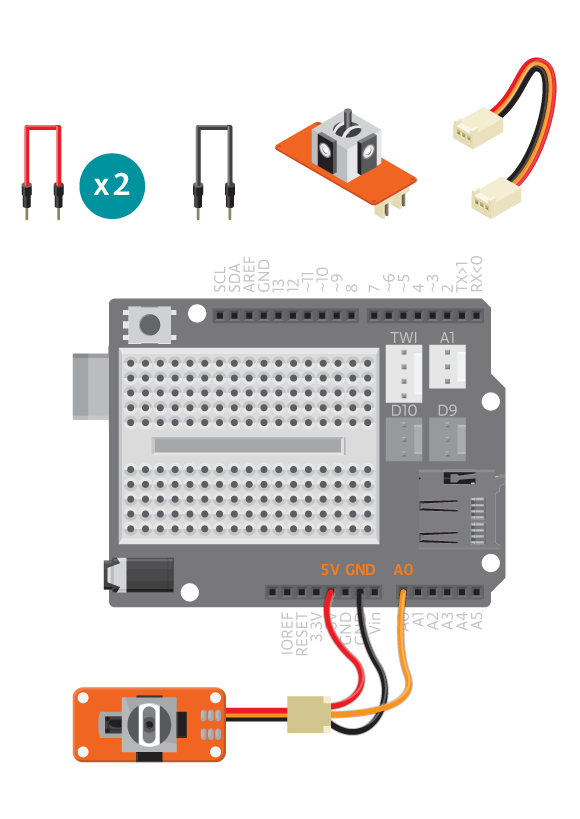
- Conecta uno de los cables al joystick TinkerKit en el puerto marcado con Y. Conecta un cable rojo al extremo opuesto del cable TinkerKit asegurándote de que vaya a 5V (es decir, al cable rojo del Tinkerkit). Conecta un cable negro entre el conector negro TinkerKit y a tierra (es decir, a 0V). Conecta el último cable al TinkerKit y al Pin analógico A0.
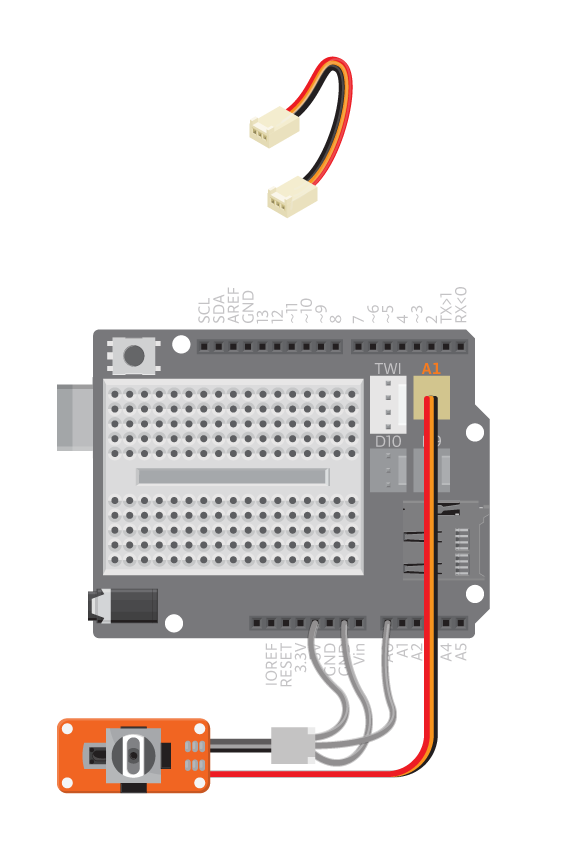
- Conecta el segundo cable TinkerKit al joystick en el puerto X y al conector analógico TinkerKit.
- Carga el ejemplo Archivo -> Ejemplos -> BasicEducationShield -> Robots -> CameraRobot.
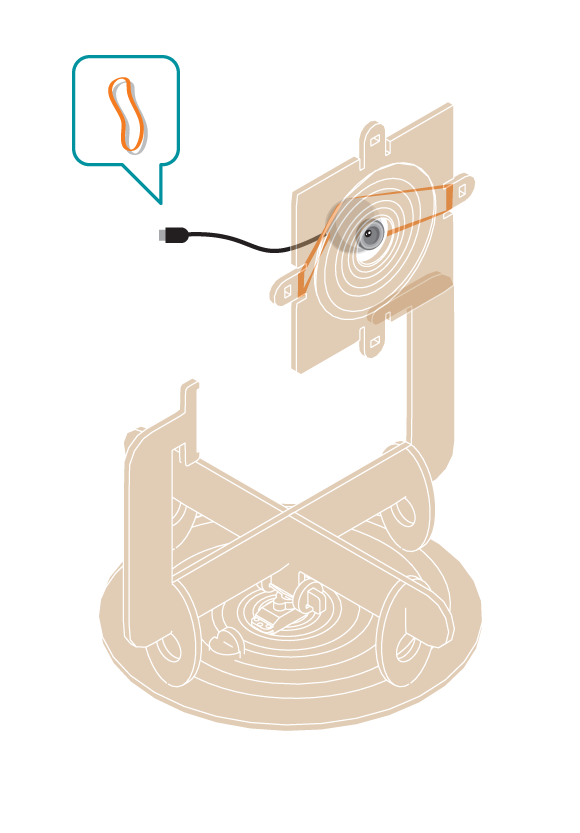
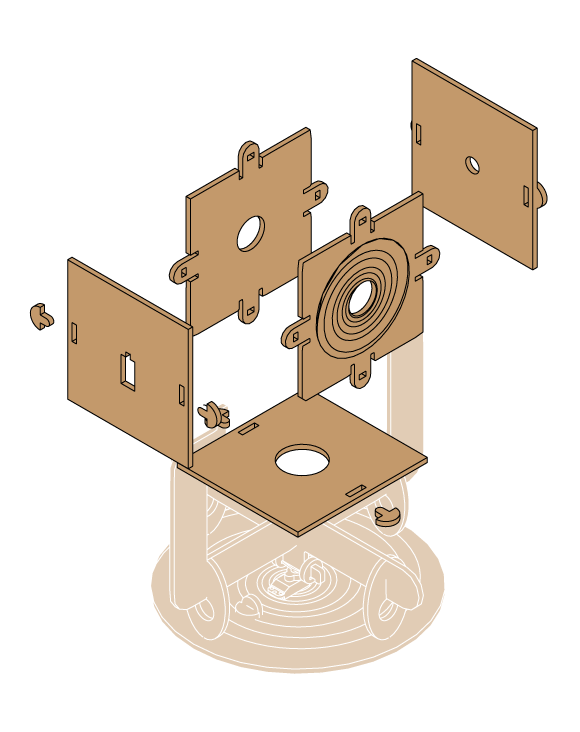
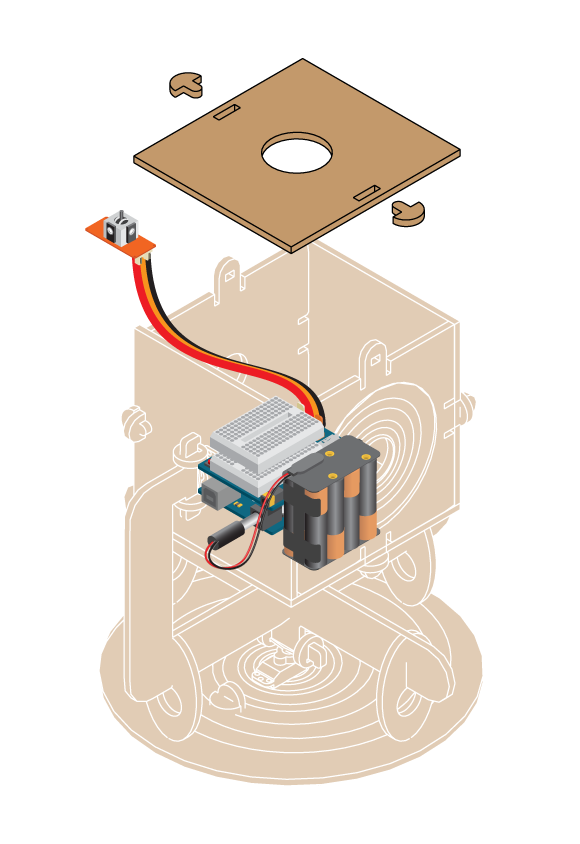
- Construye el kit, ¡no olvides meter la webcam dentro!

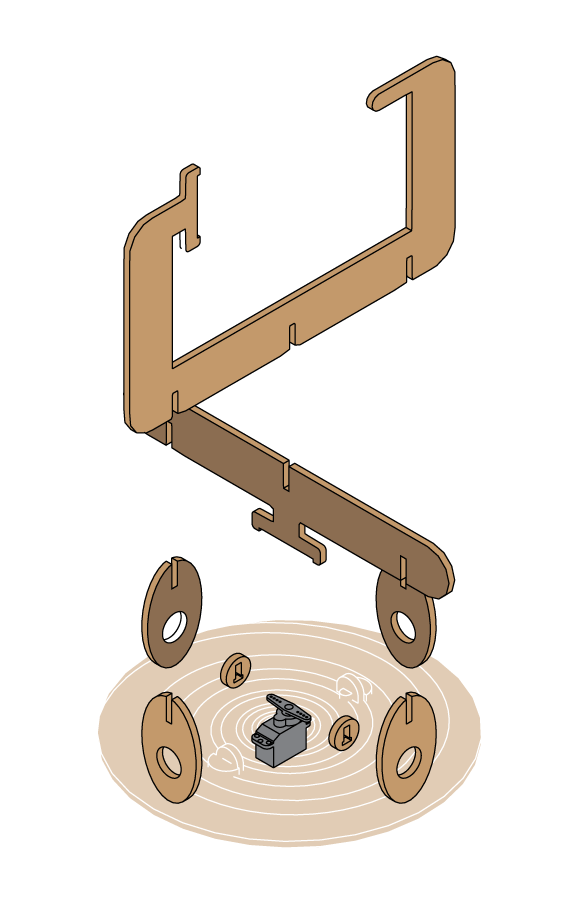
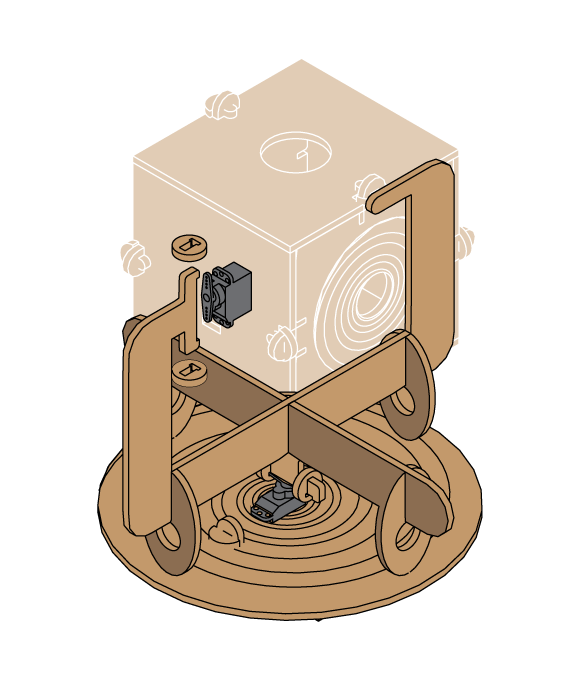
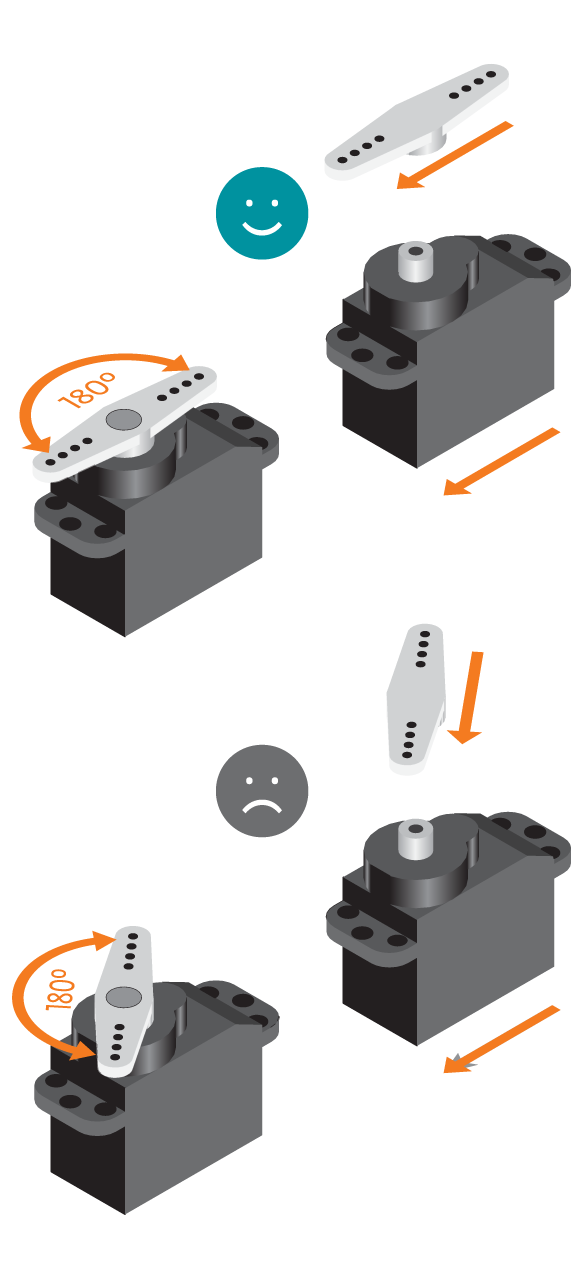
- Gira el servo a mano hasta llegar al final de su recorrido. Gíralo a mano hasta la posición de 90 grados. Fija el brazo con forma de barra a lo largo del servo. Haz lo mismo con el otro servo.
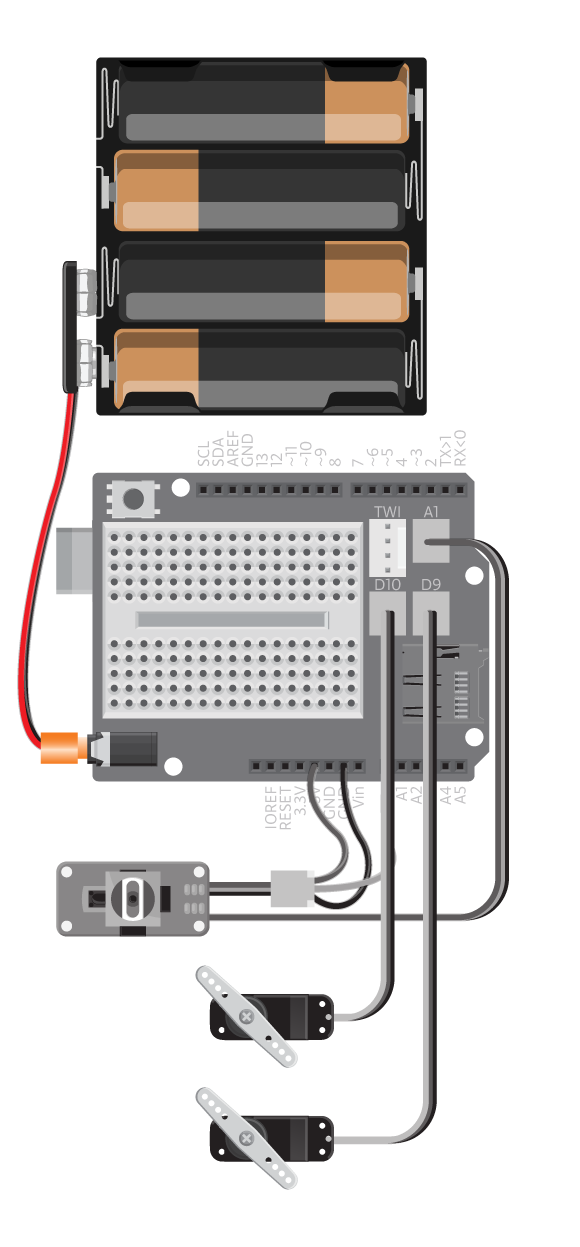
- Conecta el servo lateral al pin D10.
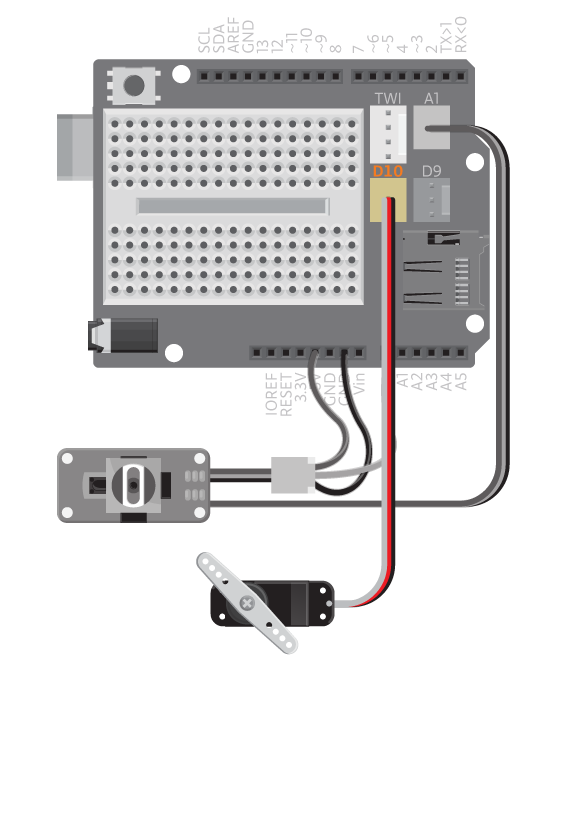
- Conecta el servo inferior encargado de hacer el barrido panorámico al pin D9.
- Conecta la batería al jack de alimentación.
- Conecta la cámara web al ordenador. Abre el programa de Processing llamado CameraRobot y ejecútalo.

Código
Puedes encontrar el código en: Archivo -> Ejemplos -> EducationShield>Block4-Robots>Projects>CameraRobot
Cómo funciona
Leemos los valores del joystick. Estos valores serán o bien 0, -1 o 1 para cada eje. 0 es si el joystick está en el medio, -1 es uno de los lados y 1 es el otro lado.
Ya que sólo podemos mover un servo a la vez, tenemos que comprobar a cuál vamos a escribir. Si el valor X del joystick no es 0, desconectamos por software con dettach el servo que controla la inclinación (tilt en inglés) para controlar el servo de giro (pan en inglés). A continuación, comprobamos a qué lado se está moviendo el joystick y luego agregamos o quitamos una unidad del ángulo de giro.
Si de contrario, el valor X del joystick es 0, significa que no está siendo movido en el eje X. Así que en su lugar desconectamos el servo de giro y conectamos el servo de inclinación. A continuación, comprobamos el movimiento del joystick en el eje Y para escribir el valor del ángulo al servo correspondiente.
¿No funciona?
- Asegúrate de que has conectado los servos correctamente. Mira la referencia para asegurarte de que los servos funcionan.
- Asegúrate de que el joystick esté conectado correctamente. Mira la referencia para asegurarte de que funciona.
¡Sigue experimentando!
- ¿Se están moviendo los servos demasiado lento o demasiado rápido? Intenta cambiar el
delayal final delloopo intenta cambiar el aumento y la disminución de los ángulos. - ¿Los servos se mueven demasiado a los lados, o demasiado hacia arriba y abajo? Intenta limitar los ángulos permitidos.